
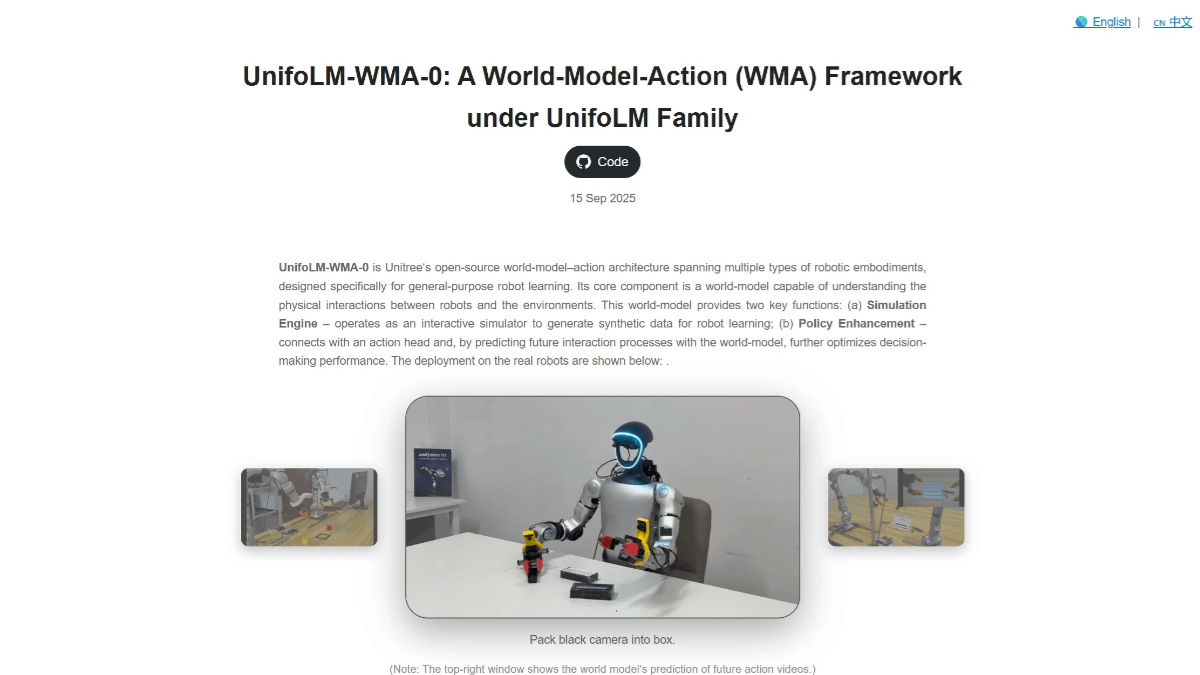
UnifoLM-WMA-0是什么
UnifoLM-WMA-0 是宇树科技开源的跨多类机器人本体的开源世界模型-动作架构,专为通用机器人学习而设计。由世界模型和动作架构组成,世界模型能理解机器人与环境的交互物理规律,动作架构则负责具体的动作执行。一是作为仿真引擎运行,为机器人学习提供合成数据,像一个虚拟训练场,可以生成大量合成数据供机器人学习和训练;二是与动作头对接,通过预测未来与物理世界的交互过程,进一步优化决策性能。采用该架构的机器人能执行一系列复杂任务,如按顺序叠放木块、整理物品等。
UnifoLM-WMA-0的功能特色
- 跨平台通用性:支持多种机器人本体,包括四足机器人、机械臂等,能实现不同机器人之间的学习迁移和协同工作。
- 世界模型驱动:通过构建世界模型,理解机器人与环境的交互物理规律,为机器人提供对环境的深度认知,能预测和适应复杂场景。
- 仿真引擎功能:作为交互式仿真器运行,为机器人学习提供合成数据,加速学习过程,降低真实环境中的试错成本。
- 动作架构优化:与动作头对接,通过预测未来与物理世界的交互过程,进一步优化决策性能,提高动作的准确性和效率。
- 开源与持续更新:完整开源代码,提供详细的文档和示例,方便开发者使用和扩展。宇树科技承诺持续更新,确保架构的先进性和实用性。
- 复杂任务执行:支持机器人执行一系列复杂任务,如按顺序叠放物品、整理桌面等,展现强大的任务适应性和灵活性。
UnifoLM-WMA-0的核心优势
- 跨平台通用性:能支持多种类型的机器人本体,包括四足机器人、机械臂等,实现不同机器人之间的学习迁移和协同工作,具有很强的通用性和扩展性。
- 高效数据生成:作为交互式仿真器运行,可以快速生成大量合成数据,为机器人学习提供丰富的训练素材,加速学习过程,降低在真实环境中的试错成本。
- 决策性能优化:通过世界模型预测未来与物理世界的交互过程,进一步优化动作头的决策性能,提高机器人在复杂环境中的适应性和动作的准确性。
- 复杂任务适应性:支持机器人执行一系列复杂任务,如按顺序叠放物品、整理桌面等,展现强大的任务适应性和灵活性,能够满足多样化的应用场景需求。
UnifoLM-WMA-0官网是什么
- 项目官网:https://unigen-x.github.io/unifolm-world-model-action.github.io/
- GitHub仓库:https://github.com/unitreerobotics/unifolm-world-model-action
UnifoLM-WMA-0的适用人群
- 科研人员:能基于开源架构进行机器人学习、人工智能和机器学习相关的研究,探索新的算法和模型。
- 高校师生:为机器人工程、人工智能等专业的学生和教师提供一个实践平台,用于教学和科研项目。
- 机器人开发者:帮助开发者快速构建和优化机器人的动作和决策系统,加速产品开发周期。
- 行业应用工程师:适用于在物流、工业自动化、服务机器人等领域工作的工程师,用于优化机器人在实际场景中的应用。
- 技术爱好者:对机器人和人工智能技术感兴趣的爱好者,可以通过该架构进行学习和实验,探索机器人的各种可能性。
© 版权声明
文章版权归 AI分享圈 所有,未经允许请勿转载。
相关文章

暂无评论...