
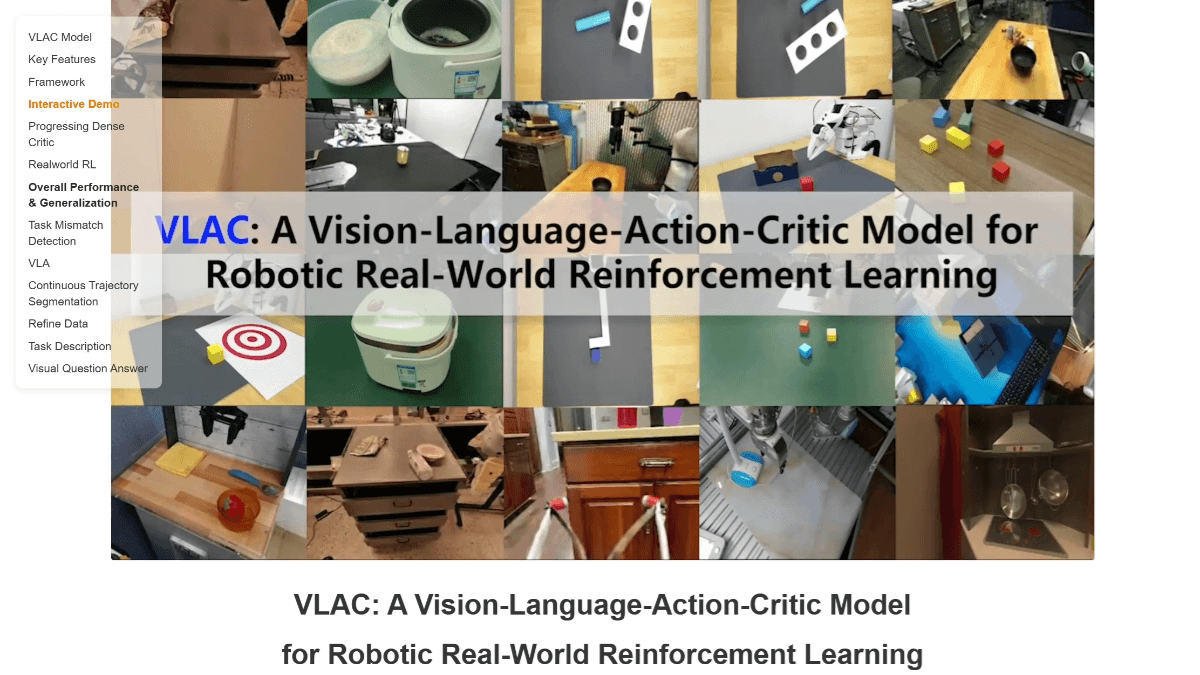
VLAC是什么
VLAC是上海人工智能实验室开源的具身奖励大模型。以InternVL多模态大模型为基础,融合互联网视频数据和机器人操作数据,为机器人在真实世界中的强化学习提供过程奖励和任务完成情况估计。VLAC能有效区分正常推进与异常/停滞行为,支持通过in-context learning实现小样本快速泛化。具备局部平滑性和负向奖励机制,确保强化学习的稳定性和有效性。VLAC能输出奖励信号,能输出机器人动作指令,助力机器人在真实世界中自主学习和快速适应新场景。VLAC支持人机协作模式,进一步提升训练效率。
VLAC的功能特色
- 多模态数据融合:结合互联网视频数据和机器人操作数据,提升对任务和环境的综合理解能力。
- 过程奖励与完成估计:提供任务的过程奖励和完成情况估计,为强化学习提供稳定且可靠的监督信号。
- 异常行为识别:能有效区分正常推进与异常/停滞行为,避免无效探索,提高学习效率。
- 小样本快速泛化:支持in-context learning,通过少量样本快速适应新任务,提升模型的泛化能力。
- 动作指令输出:在提供奖励信号的同时,生成机器人动作指令,实现从感知到行动的闭环控制。
- 强化学习框架支持:围绕VLAC搭建的VLA强化学习框架,支持多机器人在真实世界中的协同学习和快速适应。
- 人机协作优化:通过多种人机协作模式,如专家数据回放和手动协助探索,进一步提升训练灵活性和学习效率。
VLAC的核心优势
- 高效奖励信号生成:能提供连续、密集且可靠的奖励信号,有效支持强化学习过程,加速机器人学习效率。
- 强大的异常行为识别:可以精准区分正常操作与异常/停滞行为,避免无效探索,提高学习效率和任务成功率。
- 出色的泛化能力:通过in-context learning实现小样本快速泛化,快速适应新任务和新场景,减少数据需求。
- 动作指令与奖励一体化:提供奖励信号,能输出机器人动作指令,实现从感知到行动的闭环控制,提升任务执行效率。
- 强化学习框架集成:围绕VLAC搭建的VLA强化学习框架,支持多机器人协同学习,提升机器人在真实世界中的适应能力。
- 人机协作优化:支持多种人机协作模式,如专家数据回放和手动协助探索,进一步提升训练灵活性和学习效率。
- 数据驱动的训练方式:融合互联网视频数据和机器人操作数据,利用大规模数据提升模型的稳定性和可靠性。
- 开源与社区支持:作为开源项目,提供丰富的文档和社区支持,方便开发者和研究人员快速上手和参与贡献。
VLAC官网是什么
- 项目官网:https://vlac.intern-ai.org.cn
- Github仓库:https://github.com/InternRobotics/VLAC
- HuggingFace模型库:https://huggingface.co/InternRobotics/VLAC
VLAC的适用人群
- 机器人研发工程师:利用VLAC提升机器人的学习效率和任务完成率,加速机器人在真实世界中的应用开发。
- 人工智能研究人员:研究强化学习、多模态融合等前沿技术,借助VLAC进行算法优化和模型改进。
- 高校及科研机构:作为教学和研究工具,帮助学生和研究人员深入理解具身智能和强化学习的最新进展。
- 科技企业:开发智能机器人产品的企业,通过VLAC提升产品的智能化水平和市场竞争力。
- 机器人操作与维护人员:在实际操作中使用VLAC优化机器人任务执行,提高工作效率和质量。
© 版权声明
文章版权归 AI分享圈 所有,未经允许请勿转载。
相关文章


暂无评论...