
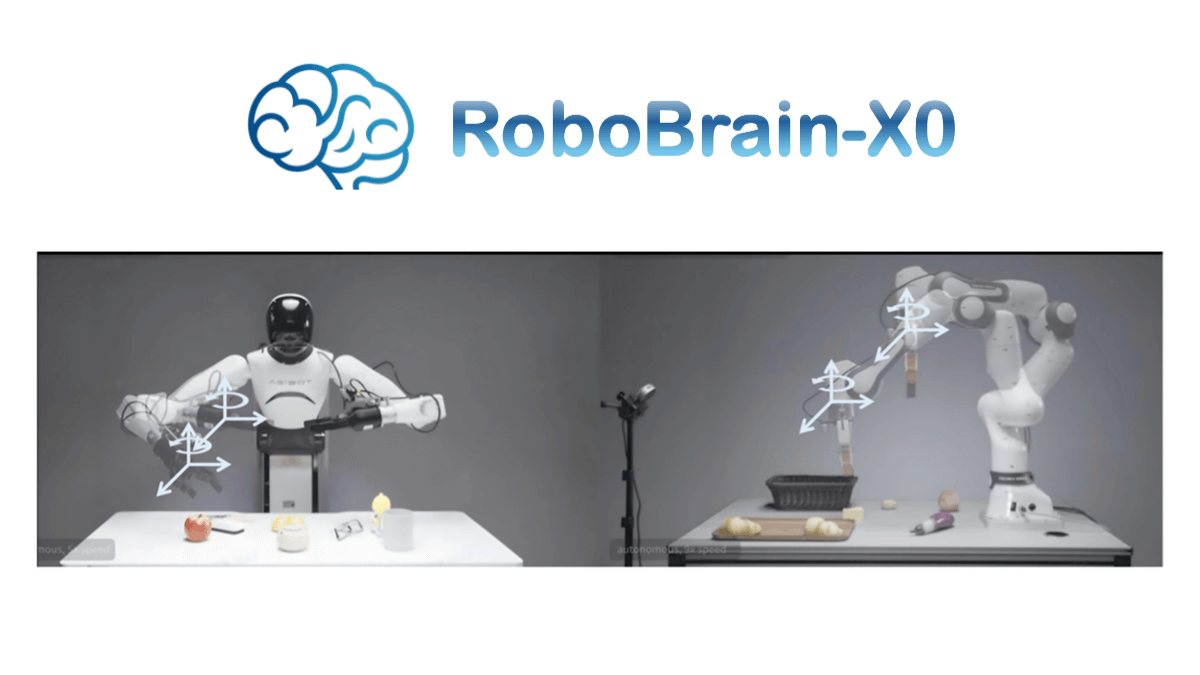
RoboBrain-X0是什么
RoboBrain-X0是智源研究院开源的全球首个支持零样本跨本体泛化的开源具身模型,具有重要的行业意义。能在无需微调的情况下,驱动多种不同构造的真实机器人完成基础操作任务,在少量样本微调后展现出对复杂任务的跨本体适配性。通过统一建模视觉、语言与动作,实现了跨本体的泛化与适配,具备从感知到执行的一体化能力,为具身智能行业提供了一个可复用、可扩展的通用基座,同时开源训练数据集,有望加速具身智能在服务机器人、智能制造等领域的应用落地。
RoboBrain-X0的功能特色
- 零样本跨本体泛化:能直接驱动多种不同构造的真实机器人完成基础操作任务,无需针对每种机器人进行单独的微调。
- 小样本微调潜力:在少量样本(如50条)微调后,可显著提升模型对复杂任务的跨本体适配性,进一步优化任务执行效果。
- 控制一致性:不同机器人在执行同一任务时,生成的动作序列高度一致,确保了实际操作的可靠性和稳定性。
- 统一建模:将视觉、语言和动作进行统一建模,实现了从感知到执行的一体化能力,为机器人提供了更全面的智能支持。
- 高效任务拆解:能将复杂任务分解为通用语义动作序列,实时翻译为具体机器人的可执行指令,提高了任务执行的灵活性和适应性。
- 开放数据集支持:开源了其核心训练数据集,为开发者提供了丰富的数据资源,有助于加速具身智能技术的研发和应用。
- 多模态输入输出:支持多种输入方式(如单图像、多图像、文本)和多维度的动作输出,适应多种任务场景和操作需求。
RoboBrain-X0的核心优势
- 跨本体泛化能力强:能实现多种不同机器人之间的零样本迁移,无需针对每种机器人重新训练模型,大大提高了模型的通用性和适应性。
- 高效任务执行:通过将复杂任务分解为通用语义动作序列,再实时翻译为具体机器人的可执行指令,确保了任务执行的高效性和准确性。
- 数据集开源:提供了丰富的开源训练数据集,为开发者提供了宝贵的资源,有助于加速具身智能技术的研发和应用。
- 多模态融合:统一建模视觉、语言与动作,使模型具备从感知到执行的一体化能力,能够更好地理解和适应真实世界中的复杂任务。
- 小样本微调潜力大:在少量样本微调后,模型能够进一步提升对复杂任务的跨本体适配性,展现出更强的泛化能力,降低了数据采集和训练成本。
- 控制一致性高:不同本体在执行同一任务时,生成的动作原语序列高度一致,确保了实际物理执行的可靠性和稳定性。
- 技术架构先进:采用分组残差量化器(GRVQ)等先进技术,将不同自由度和机械结构的连续控制序列映射到共享的离散动作原语空间,提升了模型的语义一致性和可转移性。
RoboBrain-X0官网是什么
- 项目官网:https://superrobobrain.github.io/
- Github仓库:https://github.com/FlagOpen/RoboBrain-X0
- HuggingFace 模型库:https://huggingface.co/BAAI/RoboBrain-X0-Preview
- RoboBrain-X0-Dataset:https://huggingface.co/datasets/BAAI/RoboBrain-X0-Dataset
RoboBrain-X0的适用人群
- 机器人研发工程师:用模型快速开发和部署多种机器人的应用,减少针对不同机器人硬件的重复开发工作。
- 人工智能研究人员:能基于此模型进行具身智能、多模态学习等前沿领域的研究,推动技术发展。
- 高校及科研机构:作为教学和研究工具,帮助学生和研究人员更好地理解和实践机器人与人工智能的结合。
- 智能制造企业:可用于优化生产流程,提升自动化水平,实现机器人在复杂工业场景中的灵活应用。
- 服务机器人企业:加速服务机器人产品的开发和迭代,提高机器人在不同服务场景中的适应性和用户体验。
- 物流与仓储行业从业者:借助该模型提升物流机器人在货物分拣、搬运等任务中的效率和准确性。
© 版权声明
文章版权归 AI分享圈 所有,未经允许请勿转载。
相关文章

暂无评论...