

多智能体系统 (Multi-Agent System, MAS) 是一个由多个交互的智能体 (Intelligent Agent) 组成的计算系统。多智能体系统可用于解决单个智能体或单体系统难以解决或无法解决的问题。智能体可以是机器人、人、或软件。它们可以具有不同的目标和能力,通过协作或竞争来实现各自或共同的目标。
多智能体系统强调智能体的自主性、交互性和适应性,使其在复杂、动态和开放的环境中具有更强的鲁棒性、灵活性和可扩展性。
核心概念
智能体 (Agent)
智能体是 MAS 的基本组成部分,它可以感知环境 (Environment)、进行推理 (Reasoning)、做出决策 (Decision-making) 并采取行动 (Action)。一个智能体通常具有以下特征:
- 自主性 (Autonomy):智能体可以根据自身状态和目标自主行动,无需外部控制。
- 反应性 (Reactivity):智能体能够感知环境的变化并及时做出反应。
- 主动性 (Proactivity):智能体能够主动采取行动来实现目标,而不仅仅是被动地响应环境。
- 社交性 (Sociality):智能体能够与其他智能体进行交互、协作或竞争。
环境 (Environment)
环境是智能体所处的外部世界,它为智能体提供感知信息,并受到智能体行动的影响。环境可以是物理的(如现实世界)或虚拟的(如计算机模拟)。
交互 (Interaction)
交互是指智能体之间的通信和协调。智能体可以通过共享知识、协商目标、协调行动等方式进行交互。交互可以是合作性的,也可以是竞争性的。
MAS 架构
MAS 的架构描述了智能体的组织方式和交互方式。常见的 MAS 架构包括:
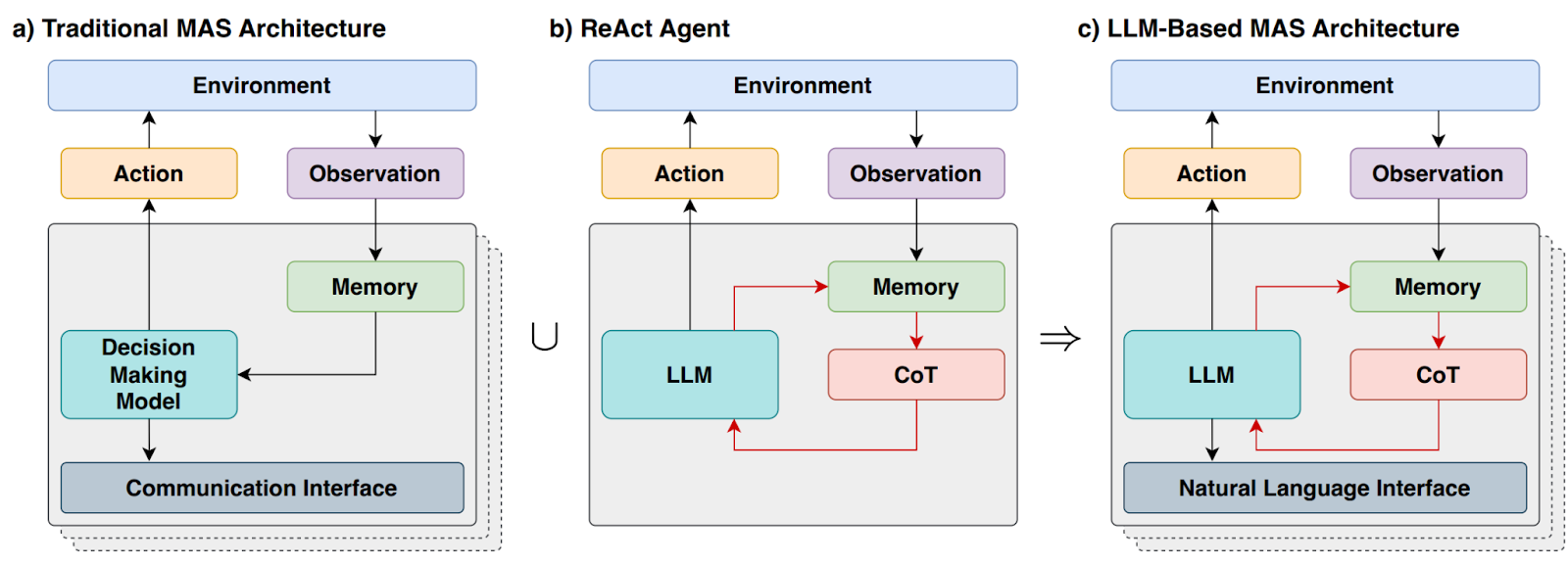
- 传统型 (Traditional):智能体通过观察和行动与环境互动。这种架构简单直接,类似于生物个体与环境的交互。
- 反应式 (Reactive):智能体的行为直接由感知到的环境刺激触发,不涉及复杂的推理过程。这种架构的智能体反应迅速,但可能缺乏长期规划能力。
- 慎思式 (Deliberative):智能体具有内部状态和知识表示,能够进行推理和规划。这种架构的智能体能够进行复杂的决策,但可能反应较慢。
- 混合式 (Hybrid):结合了反应式和慎思式架构的优点,智能体既能快速响应环境变化,又能进行长期规划。
- 基于信念-期望-意图 (Belief-Desire-Intention, BDI):一种常用的慎思式架构,智能体的行为由其信念(对世界的认知)、期望(希望达成的状态)和意图(计划采取的行动)驱动。
- ReAct (Reasoning and Acting):在行动的同时进行推理,类似于人类在行动前的思考。
- 基于大型语言模型 (Large Language Model, LLM):利用 LLM 强大的语言理解和生成能力,赋予智能体更强的推理和协作能力。
下图展示了 MAS 架构
MAS 的关键技术
通信 (Communication)
智能体之间需要通过通信来交换信息、协调行动。常用的通信方式包括:
- 直接通信:智能体之间直接发送和接收消息。
- 间接通信:智能体通过共享的环境或中间媒介进行通信。
- 通信协议:智能体之间通信需要遵循一定的协议,如 KQML (Knowledge Query and Manipulation Language) 和 FIPA (Foundation for Intelligent Physical Agents) 等。
协调 (Coordination)
协调是指智能体之间为了实现共同目标而进行的协作。常用的协调机制包括:
- 协商 (Negotiation):智能体通过谈判达成一致的行动方案。
- 合作 (Cooperation):智能体共同完成任务,共享资源和知识。
- 竞争 (Competition):智能体为了争夺有限的资源而进行竞争。
学习 (Learning)
学习是指智能体通过与环境或其他智能体的交互来改进自身行为的能力。常用的学习方法包括:
- 强化学习 (Reinforcement Learning):智能体通过试错学习,根据环境的反馈来调整行为策略。
- 多智能体强化学习 (Multi-Agent Reinforcement Learning, MARL):多个智能体在共享环境中学习,相互影响和共同进化。
- 进化算法 (Evolutionary Algorithm):模拟生物进化过程,通过选择、交叉和变异等操作来优化智能体的行为。
规划 (Planning)
规划是指智能体为了实现目标而制定行动计划的过程。常用的规划方法包括:
- 经典规划 (Classical Planning):基于状态空间搜索,找到从初始状态到目标状态的行动序列。
- 分层规划 (Hierarchical Planning):将复杂任务分解为多个子任务,分别进行规划。
- 多智能体规划 (Multi-Agent Planning):多个智能体协同制定行动计划。
MAS 的应用领域
MAS 的应用非常广泛,涵盖了许多需要多个智能体协同工作的领域,例如:
- 机器人学 (Robotics):多个机器人协同完成探索、救援、搬运等任务。
- 分布式控制 (Distributed Control):多个智能体协同控制复杂的系统,如智能电网、智能交通系统等。
- 电子商务 (E-commerce):多个智能体代表买家和卖家进行自动协商和交易。
- 游戏 (Games):多个游戏角色协同或对抗,提供更真实、更具挑战性的游戏体验。
- 模拟 (Simulation):模拟复杂的社会、经济或生物系统,研究其演化规律。
- 代码开发: 智能体可以协同完成代码编写、测试、审查工作。
- 智慧城市/智能制造: 多个智能体控制城市中的各项基础设施,工厂中的各项生产设备,完成复杂的控制任务。
- 金融交易: 金融交易智能体可以模拟人类交易员,在高频交易、决策分析中表现出超越人类的能力。
MAS 的挑战与未来
尽管 MAS 已经取得了显著的进展,但仍然面临着许多挑战:
- 异构性 (Heterogeneity):智能体可能具有不同的硬件、软件和通信协议,如何实现异构智能体之间的互操作?
- 可扩展性 (Scalability):随着智能体数量的增加,如何保证系统的性能和稳定性?
- 鲁棒性 (Robustness):如何保证系统在面对智能体故障、环境变化等不确定因素时仍然能够正常运行?
- 安全性 (Security):如何防止恶意智能体的攻击和破坏?
- 伦理性 (Ethics):如何确保 MAS 的行为符合伦理道德规范?
随着人工智能技术的不断发展,特别是大型语言模型 (LLM) 的兴起,MAS 将迎来新的发展机遇。LLM 强大的推理能力和语言能力,有望为 MAS 带来以下变革:
- 更强的智能体能力:LLM 可以赋予智能体更强的自然语言理解和生成能力,使其能够更好地理解人类意图和进行人机交互。
- 更高效的协作方式:LLM 可以促进智能体之间的知识共享和协同推理,提高协作效率。
- 更广泛的应用场景:LLM 可以拓展 MAS 的应用领域,如智能客服、智能教育、智能医疗等。
正如 Nexus 项目介绍文章中提到的:“大型语言模型 (LLM) 领域的最新进展正在改进 MAS 架构及其应用能力,例如接近人类的推理能力。当集成到 MAS 架构中时,LLM 可以充当中央推理智能体,增强在动态环境中的适应性、协作和决策能力。”
未来,MAS 将朝着更智能、更协同、更可靠的方向发展,为人类社会带来更多便利和价值。
© 版权声明
文章版权归 AI分享圈 所有,未经允许请勿转载。
相关文章



暂无评论...