
UnifoLM-WMA-0 - Yushu Technology Open Source World Model Action Architecture

Что такое UnifoLM-WMA-0?
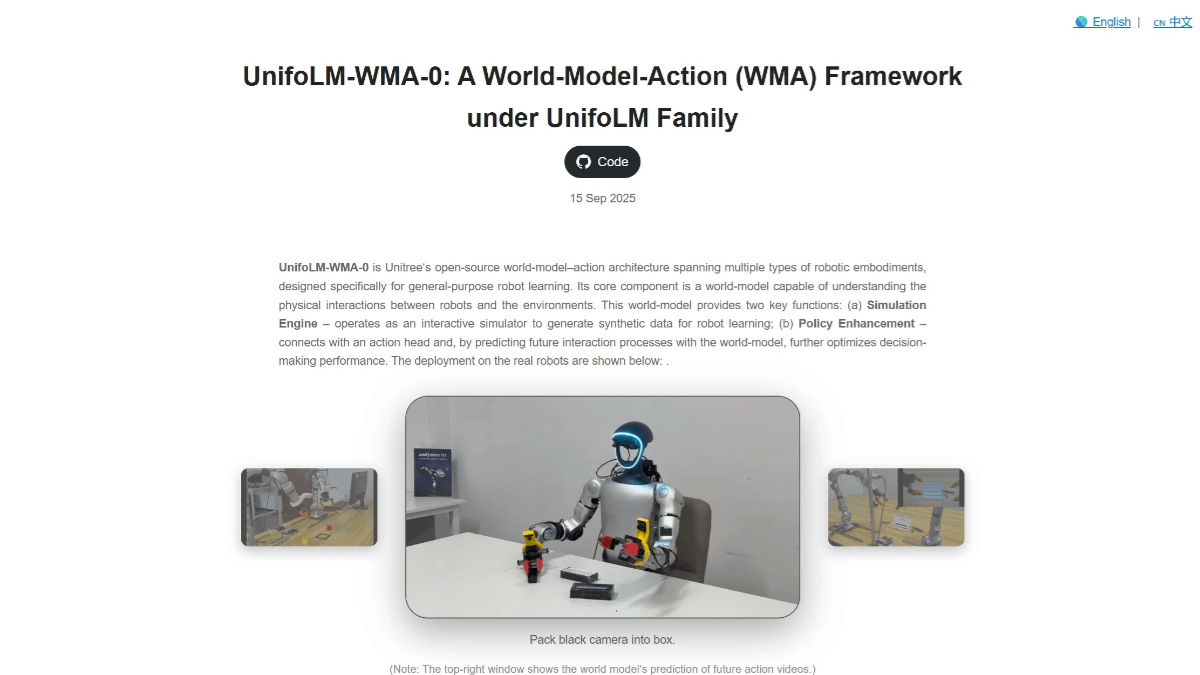
UnifoLM-WMA-0 - это архитектура с открытым исходным кодом, представляющая собой модель мира и архитектуру действий для нескольких классов онтологий роботов и предназначенная для общего обучения роботов. Состоящая из модели мира и архитектуры действий, модель мира понимает физические законы взаимодействия робота с окружающей средой, а архитектура действий отвечает за выполнение конкретных действий. Во-первых, она работает как симулятор, предоставляя синтетические данные для обучения робота, как виртуальный полигон, который может генерировать большое количество синтетических данных для обучения и тренировки робота; во-вторых, она взаимодействует с головкой действий для дальнейшей оптимизации процесса принятия решений путем прогнозирования будущего процесса взаимодействия с физическим миром. Роботы, использующие эту архитектуру, способны выполнять целый ряд сложных задач, таких как последовательное складывание деревянных блоков и упорядочивание предметов.
Характеристики UnifoLM-WMA-0
- Кроссплатформенная универсальность: Поддерживает широкий спектр онтологий роботов, включая четвероногих роботов, роботизированные руки и т.д., обеспечивая миграцию и совместную работу различных роботов.
- Мировая модель водителя: Понимание физических законов взаимодействия роботов с окружающей средой путем построения модели мира, которая обеспечивает роботам глубокие знания об окружающей среде, способные предсказывать и адаптироваться к сложным сценариям.
- Особенности механизма моделирования: Работает как интерактивный симулятор, предоставляя синтетические данные для обучения роботов, ускоряя процесс обучения и снижая затраты на метод проб и ошибок в реальных условиях.
- Оптимизация архитектуры действий: взаимодействие с головами действий для дальнейшей оптимизации процесса принятия решений и повышения точности и эффективности действий путем прогнозирования будущих процессов взаимодействия с физическим миром.
- Открытый исходный код и постоянное обновление: Полный открытый исходный код, подробная документация и примеры, удобство использования и расширения для разработчиков. Yushu Technology стремится к постоянному обновлению, чтобы гарантировать, что архитектура передовая и практичная.
- Выполнение сложных задач: Поддержка роботов для выполнения ряда сложных задач, таких как укладка предметов в последовательности и наведение порядка на рабочих столах, демонстрируя высокую адаптивность и гибкость.
Основные преимущества UnifoLM-WMA-0
- Кроссплатформенная универсальностьОн может поддерживать множество типов онтологий роботов, включая четвероногих роботов, роботизированные руки и т.д., а также реализовывать миграцию и совместную работу различных роботов, обладая при этом высокой универсальностью и расширяемостью.
- Эффективная генерация данныхРабота в качестве интерактивного симулятора позволяет быстро генерировать большое количество синтетических данных, предоставляя богатый учебный материал для обучения роботов, ускоряя процесс обучения и снижая затраты на метод проб и ошибок в реальных условиях.
- Оптимизация эффективности принятия решений: Прогнозирование будущих процессов взаимодействия с физическим миром с помощью моделирования мира, дальнейшая оптимизация эффективности принятия решений головой действий, а также повышение адаптивности и точности действий робота в сложных условиях.
- Адаптация к сложным задачам: Поддерживая выполнение роботом ряда сложных задач, таких как укладка предметов по порядку, наведение порядка на рабочем столе и т.д., он демонстрирует высокую адаптивность и гибкость, а также способен удовлетворить потребности самых разных сценариев применения.
Какой официальный сайт у UnifoLM-WMA-0?
- Веб-сайт проекта:: https://unigen-x.github.io/unifolm-world-model-action.github.io/
- Репозиторий GitHub:: https://github.com/unitreerobotics/unifolm-world-model-action
Люди, для которых предназначен UnifoLM-WMA-0
- (научный) исследователь: Способность проводить исследования, связанные с обучением робототехнике, искусственным интеллектом и машинным обучением на основе архитектур с открытым исходным кодом, изучать новые алгоритмы и модели.
- преподаватели и студенты высших учебных заведений: Предоставить практическую платформу для студентов и преподавателей робототехники и искусственного интеллекта для обучения и исследовательских проектов.
- Разработчики роботов: Помогает разработчикам быстро создавать и оптимизировать роботизированные системы перемещения и принятия решений, ускоряя циклы разработки продуктов.
- Инженер по применению в промышленности: Для инженеров, работающих в области логистики, промышленной автоматизации, сервисной робототехники и т.д., чтобы оптимизировать применение роботов в реальных условиях.
- любитель технологий: Энтузиасты, интересующиеся робототехникой и технологиями искусственного интеллекта, могут изучать и экспериментировать с архитектурой и исследовать возможности робототехники.
© заявление об авторских правах
Авторское право на статью Круг обмена ИИ Пожалуйста, не воспроизводите без разрешения.
Похожие статьи

Нет комментариев...