10Kh RealOmni-Open - 简智机器人开源的具身智能数据集

10Kh RealOmni-Open是什么
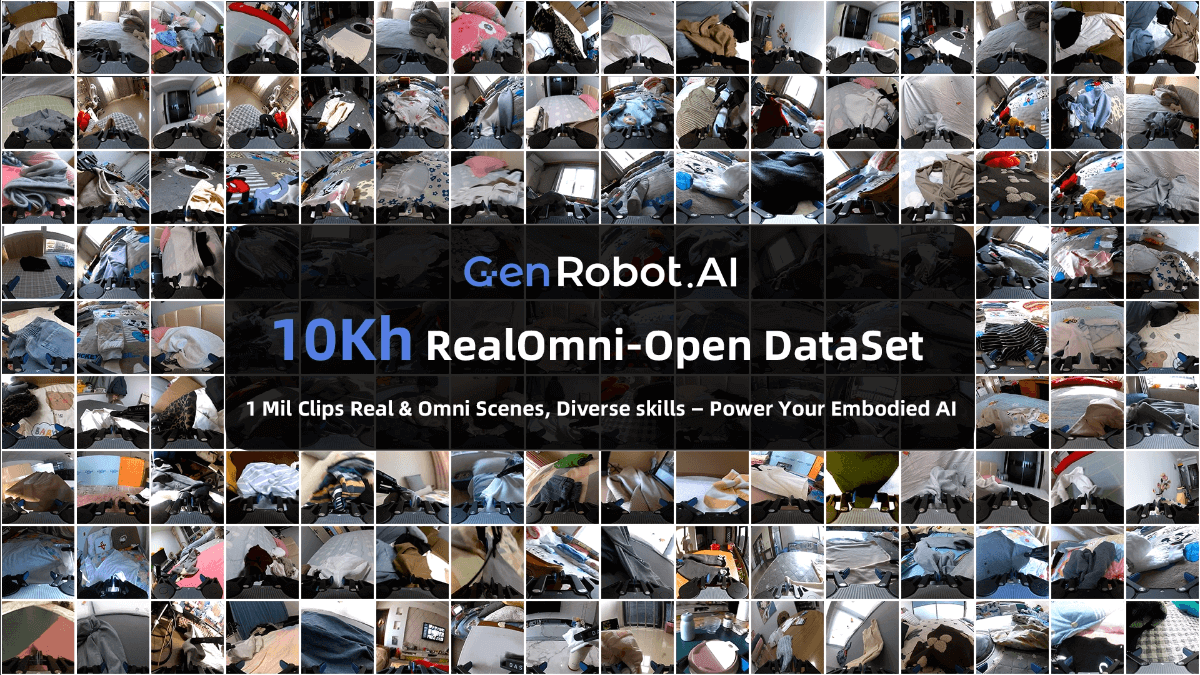
10Kh RealOmni-Open是简智机器人开源的具身智能数据集,是行业内规模最大的开源具身智能数据集。数据集累计拥有超10000小时数据、100万+片段,覆盖10大场景任务、超过30项技能。数据采集自3000+家庭,具备高画质(1600×1296@30fps)、亚厘米级轨迹精度和多模态信息。其泛化能力强,平均片段时长210秒,能完整记录复杂家务和清洁的全流程。
10Kh RealOmni-Open的功能特色
- 规模巨大:累计包含超10,000小时数据、100万+任务剪辑,存储总量达95TB,是当前行业内规模领先的开源数据集。
- 场景真实:数据采集覆盖3000个真实家庭场景,涉及近10,000个细粒度目标对象,避免了实验室环境下的数据单一性,确保模型能适应真实生活场景。
- 技能聚焦:聚焦10个关键家庭场景和30个核心技能,如衣物折叠、烹饪清洁、杂物整理、鞋带系法等,每个技能均有大量多样化样本支撑,避免技能碎片化。
- мультимодальное слияние:包含高清视频(1600×1296分辨率、30fps)、6轴IMU惯性测量数据、毫米级触觉阵列数据、机械臂关节运动轨迹及夹具开合距离等多模态信息,为模型训练提供丰富数据维度。
- 长程任务记录:99.2%的数据为双手协同的长程任务,单个任务剪辑中位长度达210秒,完整记录复杂操作流程,有助于训练模型的连续动作规划能力。
- совместное использование открытого исходного кода:遵循CC-BY-SA-4.0协议,允许商用,开发者可通过Hugging Face平台或国内合作平台(如阿里魔搭、百度百舸)下载使用,并需注明数据来源。
10Kh RealOmni-Open的核心优势
- 规模庞大:拥有超10000小时数据、100万+片段,是行业内最大的开源具身智能数据集。
- Сильные способности к обобщению:采集自3000+家庭、近10000个不同细粒度目标,避免简单重复,确保鲁棒的泛化能力。
- 真实场景:数据源自真实家庭的自然操作,聚焦10个核心家庭场景、30项核心技能。
- 双机械臂与长时长任务:完整记录复杂家务和清洁的全流程,采用GenDAS Gripper完成数据采集,片段时长中位数达210秒。
- 多模态与高质量:包含大视场原始图像、轨迹、标注和关节运动数据;轨迹重建精度与质量达到行业领先水平,数据具备高画质(1600×1296×30fps)、亚厘米级轨迹精度。
10Kh RealOmni-Open官网是什么
- Библиотека моделей обнимающихся лиц:https://huggingface.co/datasets/genrobot2025/10Kh-RealOmin-OpenData
10Kh RealOmni-Open的适用人群
- Исследователи в области воплощенного интеллекта:数据集为他们提供了丰富的研究素材,有助于探索更先进的算法和模型,推动具身智能技术的理论发展。
- 机器人开发企业:可以用这些数据训练机器人,使其具备更强的家务处理能力,加速家庭服务机器人的研发和商业化进程。
- Университеты и исследовательские институты:为相关专业的学生和科研人员提供实践和研究的平台,促进学术交流和技术突破。
- AI技术爱好者:能通过这个数据集进行学习和实验,提升自身在具身智能领域的技术水平和实践经验。
- 相关行业的创业者:可以基于数据集开发新的应用场景或产品,探索具身智能技术在不同领域的商业价值。
© заявление об авторских правах
Авторское право на статью Круг обмена ИИ Пожалуйста, не воспроизводите без разрешения.
Похожие статьи

Нет комментариев...