
알파마요-R1이란 무엇인가요?
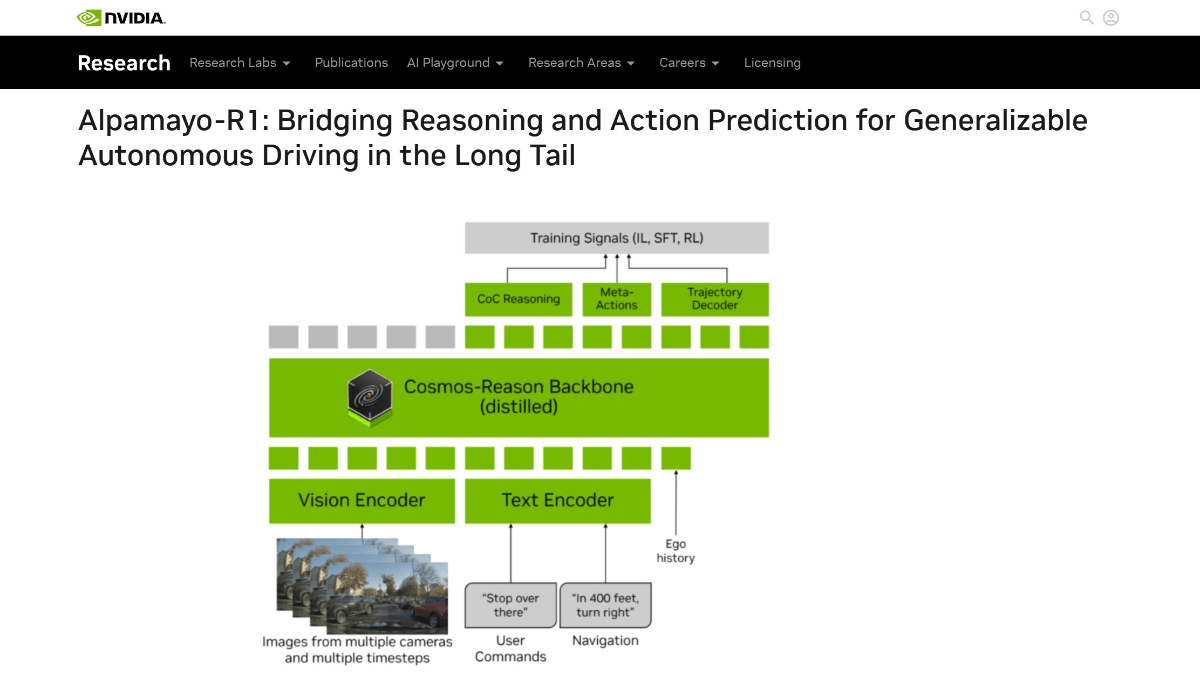
알파마요-R1은 복잡한 시나리오에서 자율 주행의 의사 결정 능력을 향상시키기 위해 설계된 추론 기능을 갖춘 엔비디아가 개발한 시각-언어-행동(VLA) 모델입니다. 인과 관계 추론 메커니즘을 도입하여 차량이 단순히 사전 설정된 명령을 실행하는 대신 인간 운전자처럼 장면 인과 관계(예: "전방 보행자 때문에 감속")를 분석할 수 있습니다. 이 모델은 다중 카메라 입력과 경량 코딩 기술을 사용하여 계산 비용을 줄이고, 강화 학습을 통해 궤적 계획을 최적화하여 롱테일 시나리오에서 사고 위험을 35%까지 줄이는 것으로 측정되었으며, 구조화된 인과관계 주석 데이터 세트와 100밀리초 미만의 실시간 추론 지연 시간을 지원하는 모듈식 설계 등 혁신적인 기능을 갖추고 있습니다.
알파마요-R1의 기능적 특징
- 인과 관계 추론 및 궤적 계획AR1은 인과관계 체인(CoC) 데이터 세트를 구축함으로써 인과관계 추론을 수행하고 구동 로직과 일치하는 추론 궤적을 생성하여 의사 결정의 정확성과 일반화를 개선할 수 있습니다.
- 효율적인 비주얼 코딩 및 특징 추출비주얼 코더를 최적화하여 멀티 카메라 이미지의 특징 추출 효율을 10~20배 향상하고 컴퓨팅 리소스 소비를 크게 줄입니다.
- 실시간 및 짧은 지연 시간모델 종단 간 추론 시간이 99밀리초에 불과하여 자율 주행의 엄격한 실시간 요구 사항을 충족합니다.
- 궤적 품질 개선개방형 및 폐쇄형 루프 평가 모두에서 AR1은 오프로드 및 근접 접촉률을 크게 줄이고 궤적의 부드러움과 안전성을 개선했습니다.
알파마요-R1의 핵심 이점
- 인과 관계 추론AR1은 인과 체인(CoC) 데이터 세트를 통해 인과 추론을 수행하여 구동 로직과 일치하는 궤적을 생성하여 의사 결정의 정확성과 일반화를 향상시킬 수 있습니다.
- 효율적인 비주얼 코딩비주얼 코더를 최적화하여 피처 토큰의 수를 크게 줄이고 계산 리소스 소비를 줄이면서 높은 정확도를 유지합니다.
- 짧은 지연 시간 및 실시간엔드투엔드 추론 시간이 99밀리초에 불과하여 자율 주행의 엄격한 실시간 요구 사항을 충족합니다.
- 궤적 품질 개선개방형 및 폐쇄 루프 리뷰 모두에서 오프로드 및 근접률을 크게 줄이고 더 부드럽고 안전한 궤적을 생성합니다.
- 오픈 소스 및 낮은 문턱오픈 소스 모델로서 자율주행 R&D의 문턱을 낮추고 업계에 강력한 기술 지원을 제공합니다.
- 멀티모달 융합시각, 언어 및 동작 정보를 결합한 AR1은 복잡한 교통 시나리오를 더 잘 이해하고 보다 정확한 계획 솔루션을 생성할 수 있습니다.
알파마요-R1의 공식 웹사이트는 무엇인가요?
- 프로젝트 웹사이트:: https://research.nvidia.com/publication/2025-10_alpamayo-r1
- arXiv 기술 논문:: https://arxiv.org/pdf/2511.00088v1
알파마요-R1이 필요한 사람
- 차량 제조업체AR1은 자동차 제조업체가 차량의 자율주행 기능을 향상시키고 자율주행 기술의 상용화를 가속화할 수 있는 강력한 자율주행 기술 솔루션을 제공합니다.
- 자율주행 R&D 팀대형 자동차 회사의 스마트 드라이빙 팀이든 스타트업 자율주행 기술 회사든, AR1의 오픈 소스 특성 덕분에 R&D 장벽을 낮추고 자율주행 기술을 보다 효율적으로 개발하고 테스트할 수 있습니다.
- 지능형 교통 솔루션 제공업체기업은 AR1을 사용하여 교통 시스템의 인텔리전스를 향상하고 교통 흐름을 최적화하며 전반적인 교통 효율성을 개선할 수 있습니다.
- 연구 기관 및 대학AR1의 오픈 소스 특성 덕분에 연구원 및 대학 연구팀이 자율 주행과 관련된 학술 연구 및 기술 탐색을 수행하는 데 이상적인 툴입니다.
- 교통 규제 기관AR1의 기술 지원을 통해 규제 당국은 자율 주행 시스템의 안전성을 더 잘 평가하고 보다 과학적인 정책과 표준을 개발할 수 있습니다.
© 저작권 정책
기사 저작권 AI 공유 서클 모두 무단 복제하지 마세요.
관련 문서



댓글 없음...