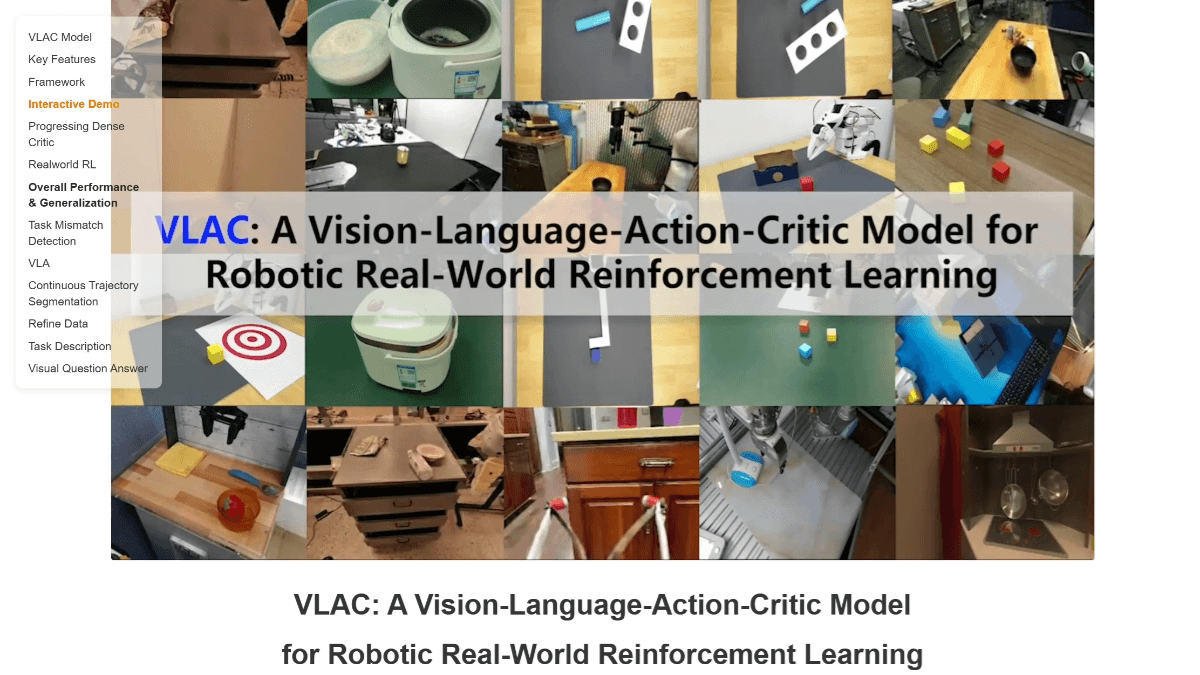
VLAC - Shanghai AI Lab's Open Source Large Model of Embodied Reward

What is VLAC?
VLAC is an open source embodied reward macromodel from Shanghai Artificial Intelligence Laboratory. Based on InternVL multimodal macromodel, it integrates Internet video data and robot operation data to provide process rewards and task completion estimation for robot reinforcement learning in the real world.VLAC can effectively differentiate between normal advancement and abnormal/stagnant behaviors, and supports rapid generalization of small samples through in-context learning. VLAC supports local smoothing and negative reward mechanism to ensure the stability and effectiveness of reinforcement learning.VLAC can output reward signals and robot action commands, which help the robot learn autonomously and adapt to new scenarios in the real world.VLAC supports human-robot collaborative modes, which further improves the training efficiency.
Features of VLAC
- Multimodal data fusion: Combining internet video data and robot operational data to improve integrated understanding of tasks and environments.
- Process Incentives and Completion Estimates: Providing process rewards and completion estimates for tasks, providing stable and reliable supervised signals for reinforcement learning.
- Abnormal Behavior Recognition: It can effectively distinguish between normal advancement and abnormal/stagnant behavior, avoiding ineffective exploration and improving learning efficiency.
- Fast generalization for small samples: Supports in-context learning, quickly adapting to new tasks with a small number of samples and improving the generalization ability of the model.
- Action command output: Generate robot action commands while providing reward signals to realize closed-loop control from perception to action.
- Reinforcement of learning framework support: A VLA reinforcement learning framework built around VLAC to support collaborative learning and rapid adaptation of multiple robots in the real world.
- Optimization of human-computer collaboration: Training flexibility and learning efficiency are further enhanced through multiple modes of human-computer collaboration, such as expert data playback and manually assisted exploration.
VLAC's core strengths
- Efficient Reward Signal Generation: It can provide continuous, dense and reliable reward signals to effectively support the reinforcement learning process and accelerate the learning efficiency of robots.
- Powerful identification of abnormal behavior: It can accurately distinguish between normal operation and abnormal/stagnant behavior, avoiding ineffective exploration and improving learning efficiency and task success.
- Excellent generalization capabilities: Fast generalization of small samples through in-context learning, fast adaptation to new tasks and scenarios, and reduced data requirements.
- Integration of action commands and rewards: Provide reward signals that can output robot action commands, realize closed-loop control from perception to action, and enhance the efficiency of task execution.
- Reinforcement Learning Framework Integration: The VLA reinforcement learning framework built around VLAC supports multi-robot collaborative learning and improves robot adaptation in the real world.
- Optimization of human-computer collaboration: Supports multiple modes of human-computer collaboration, such as expert data playback and manually assisted exploration, to further enhance training flexibility and learning efficiency.
- A data-driven approach to training: Fusion of Internet video data and robot operation data to improve the stability and reliability of the model using large-scale data.
- Open Source and Community Support: As an open source project, it provides rich documentation and community support to facilitate developers and researchers to quickly get started and participate in contributing.
What is the official website of VLAC
- Project website:: https://vlac.intern-ai.org.cn
- Github repository:: https://github.com/InternRobotics/VLAC
- HuggingFace Model Library:: https://huggingface.co/InternRobotics/VLAC
Who VLAC is for
- Robotics R&D Engineer: Utilizing VLAC to improve robot learning efficiency and task completion rates, accelerating the development of robots for real-world applications.
- Artificial intelligence researchers: Research on cutting-edge technologies such as reinforcement learning and multimodal fusion, algorithm optimization and model improvement with the help of VLAC.
- Universities and Research Institutions: serve as teaching and research tools to help students and researchers gain a deeper understanding of recent advances in embodied intelligence and reinforcement learning.
- technology company: Enterprises that develop intelligent robot products to enhance their products' intelligence and market competitiveness through VLAC.
- Robot Operator and Maintenance: Using VLAC in practice to optimize robot task execution and improve efficiency and quality.
© Copyright notes
Article copyright AI Sharing Circle All, please do not reproduce without permission.
Related posts


No comments...