RoboBrain-X0 - Wisdom Source Research Institute open source zero-sample cross ontology generalized embodiment model

What is RoboBrain-X0?
RoboBrain-X0 is the world's first open-source embodied model supporting zero-sample cross-ontology generalization open-sourced by Wisdom Source Research Institute, which is of great significance to the industry. RoboBrain-X0 can drive multiple real robots of different configurations to complete basic operation tasks without fine-tuning, and shows cross-ontology adaptability to complex tasks after a small amount of sample fine-tuning. Through unified modeling of vision, language and action, it realizes cross-ontology generalization and adaptation, and has the integration capability from perception to execution, providing a reusable and scalable universal base for the embodied intelligence industry. Meanwhile, the open-source training dataset is expected to accelerate the application of embodied intelligence in the fields of service robotics, intelligent manufacturing and so on.
Features of RoboBrain-X0
- Zero-sample cross-ontology generalization: A wide range of real robots of different configurations can be driven directly to perform basic operational tasks without the need for individual fine-tuning of each robot.
- Small sample fine-tuning potential: After fine-tuning in a small number of samples (e.g., 50 entries), the model's cross-ontology fitness for complex tasks can be significantly improved to further optimize the task execution results.
- Control consistency: The generated action sequences of different robots performing the same task are highly consistent, ensuring the reliability and stability of the actual operation.
- unified modeling: Unified modeling of vision, language, and movement enables integrated capabilities from perception to execution, providing more comprehensive intelligence support for robots.
- Efficient task disassembly: The ability to decompose complex tasks into generic semantic action sequences and translate them into executable commands for specific robots in real time improves the flexibility and adaptability of task execution.
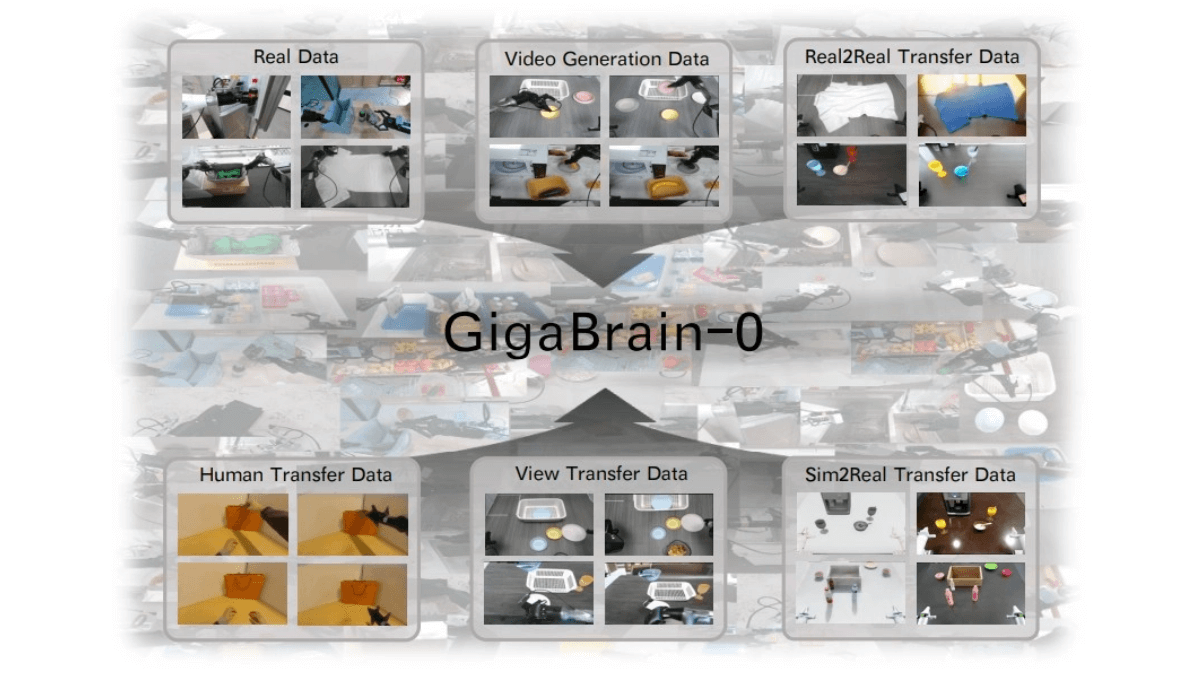
- Open dataset support: Open-sourced its core training dataset, which provides developers with rich data resources and helps accelerate the development and application of embodied intelligence technologies.
- Multimodal inputs and outputs: Supports multiple input modes (e.g., single image, multi-image, text) and multi-dimensional action outputs, adapting to a variety of task scenarios and operational needs.
RoboBrain-X0's Core Advantages
- Strong cross-ontology generalization capability: Zero-sample migration between many different robots can be realized without re-training the model for each robot, which greatly improves the generality and adaptability of the model.
- Efficient mandate implementation: By decomposing complex tasks into generic semantic action sequences and then translating them in real time into executable instructions for specific robots, it ensures efficient and accurate task execution.
- Data set open source: Provides a rich open-source training dataset, which provides a valuable resource for developers and helps accelerate the development and application of embodied intelligence technologies.
- multimodal fusion: Unifying modeling vision, language, and action gives models the ability to integrate from perception to execution, enabling better understanding and adaptation to complex tasks in the real world.
- Small samples have high potential for fine-tuning: After a small number of samples are fine-tuned, the model is able to further improve its cross-ontology adaptability to complex tasks, exhibit stronger generalization capabilities, and reduce data collection and training costs.
- High control consistency: Different ontologies generate highly consistent sequences of action primitives when performing the same task, ensuring the reliability and stability of the actual physical execution.
- Advanced Technology Architecture: Advanced techniques such as grouped residual quantizer (GRVQ) are used to map continuous control sequences with different degrees of freedom and mechanical structures into a shared discrete action primitive space, which improves the semantic consistency and transferability of the model.
What is RoboBrain-X0's official website?
- Project website:: https://superrobobrain.github.io/
- Github repository:: https://github.com/FlagOpen/RoboBrain-X0
- HuggingFace Model Library:: https://huggingface.co/BAAI/RoboBrain-X0-Preview
- RoboBrain-X0-Dataset:: https://huggingface.co/datasets/BAAI/RoboBrain-X0-Dataset
Who is RoboBrain-X0 for?
- Robotics R&D Engineer: Rapidly develop and deploy multiple robotic applications using the model, reducing duplicated development efforts for different robot hardware.
- Artificial intelligence researchers: It can be based on this model to carry out research in frontier areas such as embodied intelligence and multimodal learning, and promote the development of technology.
- Universities and Research Institutions: serve as teaching and research tools to help students and researchers better understand and practice the integration of robotics and artificial intelligence.
- Intelligent Manufacturing Enterprise: It can be used to optimize production processes, increase automation levels and enable flexible robot applications in complex industrial scenarios.
- Service Robotics Enterprise: Accelerate the development and iteration of service robot products and improve the adaptability and user experience of robots in different service scenarios.
- Logistics and warehousing industry practitioners: Improve the efficiency and accuracy of logistics robots in tasks such as cargo sorting and handling with the help of this model.
© Copyright notes
Article copyright AI Sharing Circle All, please do not reproduce without permission.
Related articles

No comments...