InternVLA-A1 - Shanghai AI Lab Open Source Integration of Operational Capabilities for Embodied Large Models

What is InternVLA-A1?
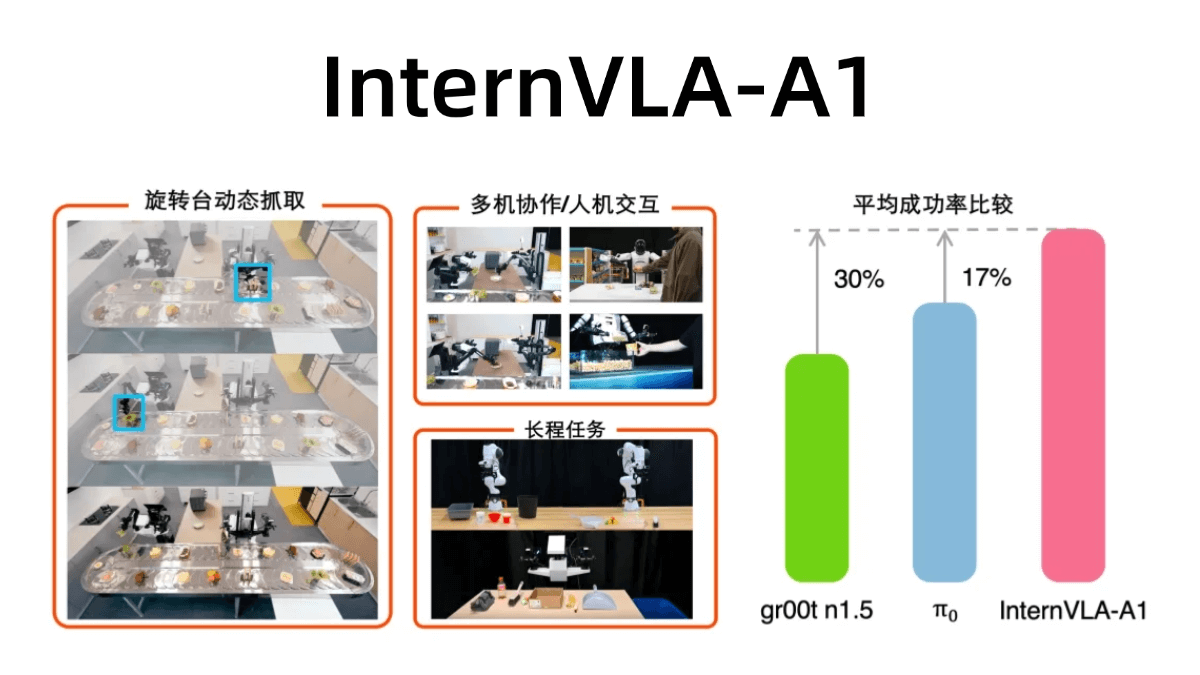
InternVLA-A1 is a large model of embodied operation open-sourced by Shanghai Artificial Intelligence Laboratory. It has the ability to integrate comprehension, imagination, and execution, and can accurately accomplish tasks. The model integrates real and simulated operation data, and automates the construction of massive multimodal corpus through large-scale mixed scene assets, with a data scale of 6 million items. Its "one brain, many shapes" feature can support multiple robot ontologies, realizing zero-sample generalization across scenes and ontologies. internVLA-A1 performs well in highly dynamic scenes, with strong adaptive ability, and can realize stable dynamic interaction. The performance of InternVLA-A1 is significantly better than other similar models in the real machine evaluation.
Functional Features of InternVLA-A1
- Integration of operational capabilities: It can realize the integrated operation of comprehension, imagination and execution, and the whole process is seamless from task comprehension to action planning to precise execution.
- Data-driven fusion of reality and reality: Training based on large-scale hybrid virtual-reality datasets, fusing real scenes and virtual simulation data to improve the model's adaptability to different environments.
- multimodal interaction: It supports multi-modal interactions such as visual, verbal, and action, and is able to understand natural language commands and generate corresponding action commands by visually sensing the environment.
- cross-platform adaptabilityThe "One Brain, Many Shapes" feature can be adapted to a variety of robot ontologies, such as humanoid robots, robotic arms, etc., to achieve cross-platform zero-sample generalization.
- Highly dynamic scene adaptation: excels in dynamically changing environments, sensing and adapting to environmental changes in real time to ensure operational stability and accuracy.
- Multi-computer collaboration capability: Supports collaborative work between multiple robots, which can reasonably allocate tasks according to task requirements and realize efficient teamwork.
- Open Source Data and Models: Provide open-source datasets and models, facilitate communication and collaboration between academia and industry, and accelerate the development of embodied intelligence technologies.
Core Benefits of InternVLA-A1
- Strong generalization capabilities: Adaptable to many different scenarios and tasks, saving time and resources by eliminating the need for extensive retraining for each specific task.
- Efficient dynamic interactions: excels in highly dynamic and complex environments, responding quickly to changes in the environment to ensure continuity and stability of operations.
- Multimodal Fusion Advantage: Integration of multiple modal information such as vision, speech, and movement makes the model's understanding of the task and environment more comprehensive and accurate, and improves the precision of operation.
- Cross-platform compatibilityThe support for multiple robot ontologies realizes "one brain, many shapes", reduces development and deployment costs, and improves the versatility and practicability of the model.
- Data-driven optimization: Training is based on large-scale mixed real-virtual datasets, which are rich and diverse, allowing the model to perform well in different scenarios.
- Multi-computer collaboration capability: It supports collaborative work between multiple robots, can reasonably allocate tasks according to task requirements, realizes efficient teamwork, and is suitable for multi-machine operation tasks in complex scenarios.
What is InternVLA-A1's official website?
- Github repository:: https://github.com/InternRobotics/InternVLA-A1
- HuggingFace data address:: https://huggingface.co/datasets/InternRobotics/InternData-A1
Individuals with InternVLA-A1
- Artificial Intelligence and Robotics Researchers: Its open-source data and models can be utilized for academic research to explore new theories and methods of embodied intelligence.
- Robotics Developer: Humanoid robots or other robotic applications can be developed and optimized based on this model to enhance the robot's operational capabilities and intelligence.
- Industrial Automation Engineer: For professionals who need to automate operations and collaborate with robots in industrial scenarios to improve productivity and quality.
- Logistics and Warehouse Managers: It can be used to optimize logistics processes, automate the sorting and handling of goods, and reduce labor costs.
- Medical and nursing practitioners: It can be used to assist medical care, reduce the workload of healthcare workers, and improve the quality and efficiency of care.
- Educators and students: In the field of education, it can be used as a teaching tool to stimulate students' interest in AI and robotics, and cultivate related professionals.
© Copyright notes
Article copyright AI Sharing Circle All, please do not reproduce without permission.
Related posts


No comments...