Alpamayo-R1 - NVIDIA's Open Source Vision-Language-Action Model with Reasoning Capabilities

What is Alpamayo-R1?
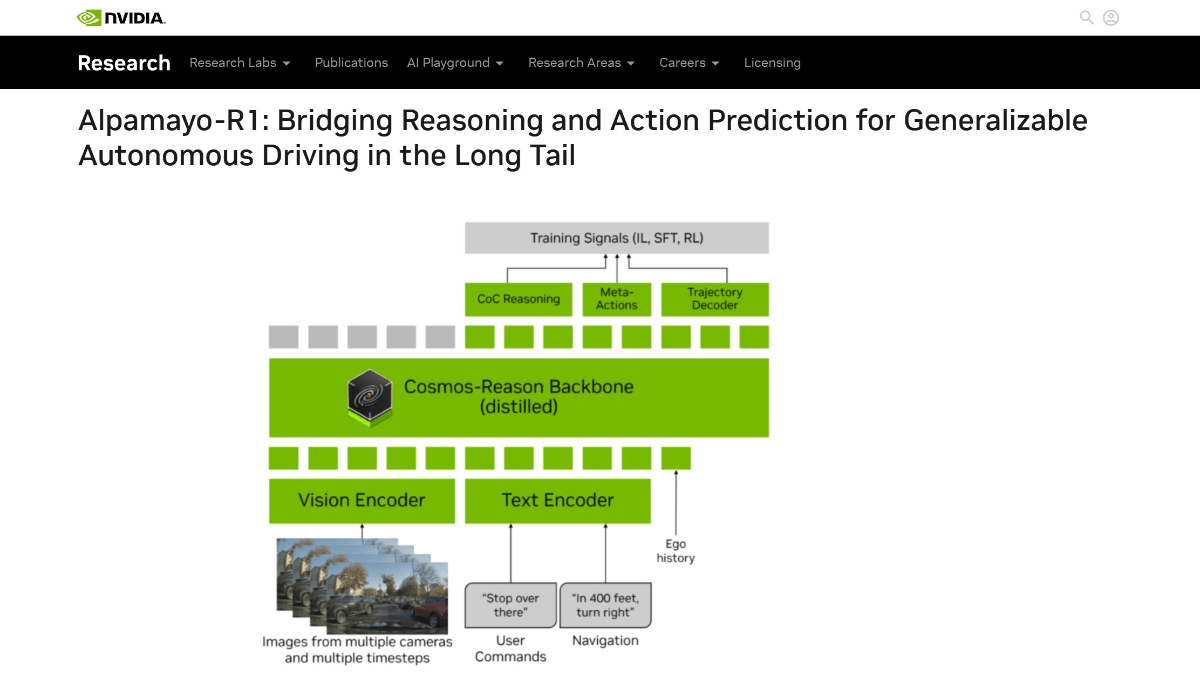
Alpamayo-R1 is a NVIDIA-developed Vision-Language-Action (VLA) model with reasoning capability, designed to enhance the decision-making capability of autonomous driving in complex scenarios. By introducing a causal chain reasoning mechanism, it allows the vehicle to analyze the causal relationship of a scene (e.g., "slow down due to pedestrians ahead") just like a human driver, instead of simply executing pre-set commands. The model uses multi-camera inputs and lightweight coding techniques to reduce computational cost, and optimizes trajectory planning through reinforcement learning, which has been measured to reduce accident risk by 35% in long-tailed scenarios.Innovations include structured causal annotated datasets and a modular design to support real-time inference latency of less than 100 milliseconds.
Functional features of Alpamayo-R1
- Causal Reasoning and Trajectory Planning: By constructing a causal chain (CoC) dataset, AR1 is able to perform causal inference and generate inference trajectories that conform to driving logic, improving the accuracy and generalization of decision-making.
- Efficient Visual Coding and Feature Extraction: Optimize the visual coder to improve the feature extraction efficiency of multi-camera images by 10-20 times and significantly reduce the consumption of computational resources.
- Real-time and low latency: The end-to-end inference time of the model is only 99 milliseconds, which meets the stringent real-time requirements of autonomous driving.
- Improvement of trajectory quality: In both open- and closed-loop evaluations, the AR1 significantly reduces off-road and near-contact rates and improves trajectory smoothness and safety.
Core Benefits of Alpamayo-R1
- causal reasoning ability: With the Causal Chain (CoC) dataset, AR1 is able to perform causal reasoning to generate trajectories that conform to driving logic, improving decision-making accuracy and generalization.
- Efficient visual coding: Optimize the visual coder to significantly reduce the number of feature tokens and reduce computational resource consumption while maintaining high accuracy.
- Low Latency and Real Time: The end-to-end inference time is only 99 milliseconds, which meets the stringent real-time requirements of autonomous driving.
- Trajectory quality improvement: Significantly reduce off-road and proximity rates and generate smoother, safer trajectories in both open- and closed-loop reviews.
- Open source and low threshold: As an open source model, it lowers the threshold of autonomous driving R&D and provides strong technical support for the industry.
- multimodal fusion: Combining visual, verbal and motion information, AR1 is able to better understand complex transportation scenarios and generate more accurate planning solutions.
What is Alpamayo-R1's official website?
- Project website:: https://research.nvidia.com/publication/2025-10_alpamayo-r1
- arXiv Technical Paper:: https://arxiv.org/pdf/2511.00088v1
Individuals for whom Alpamayo-R1 is indicated
- vehicle manufacturer: AR1 provides automakers with a powerful self-driving technology solution that can help them enhance the self-driving capabilities of their vehicles and accelerate the commercialization of self-driving technology.
- Autonomous Driving R&D Team: Whether it's a smart-driving team at a large car company or a startup self-driving tech company, the open-source nature of AR1 lowers the R&D barriers and enables more efficient development and testing of self-driving technology.
- Intelligent Transportation Solution Provider: Companies can use AR1 to enhance the intelligence of their transportation systems, optimize traffic flow, and improve overall traffic efficiency.
- Research Institutions and Universities: The open-source nature of AR1 makes it an ideal tool for researchers and university research teams to conduct academic research and technology exploration related to autonomous driving.
- traffic regulator: With AR1's technical support, regulators can better assess the safety of autonomous driving systems and develop more scientific policies and standards.
© Copyright notes
Article copyright AI Sharing Circle All, please do not reproduce without permission.
Related posts




No comments...