RoboOS 2.0 - ウィズダムスペクトラムのオープンソース・クロスオントロジー・エンボディド・ブレインサイズ・コラボレーション・フレームワーク

ロボオス2.0とは
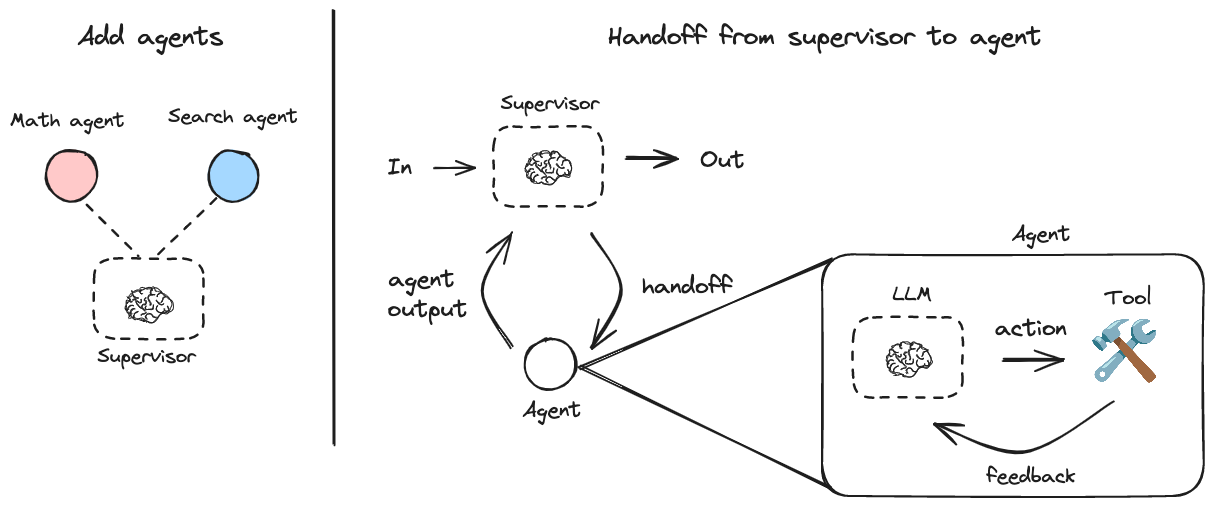
RoboOS 2.0は、オントロジーを超えた脳と脳のコラボレーションを実現するオープンソースのフレームワークであり、ロボットの単一知能からグループ協調知能への転換を促進する。RoboOS2.0は、クラウドブレインが複雑な意思決定とコラボレーションを担当し、スモールブレインモジュールが特定のスキルの実行に集中するという、効率的な役割分担を実現するために「ビッグブレイン」アーキテクチャを採用しています。このフレームワークは、軽量なデプロイメント、標準化されたインターフェイス、リアルタイムのセンシング機能により、マルチロボットのコラボレーションをサポートし、異なるハードウェアやタスクの要件に迅速に適応することができる。このフレームワークの最適化されたエンドクラウドコラボレーションメカニズムとマルチモーダルデータ処理能力は、ロボットの動的環境における適応性と実行効率をさらに高め、物流、家族サービス、工業生産などのシナリオに広く適用できる。
RoboOS 2.0の主な機能
- 複数のロボットが共同作業タスクを柔軟に割り当て、複数のロボットが同時に効率的な作業を行えることは、特に複雑なシナリオに適しており、効率を飛躍的に向上させます。
- 大脳構造と小脳構造の明確な役割分担クラウド脳は複雑な意思決定や協調的なスケジューリングに重点を置き、小脳モジュールは特定のスキルを正確に実行する役割を担っている。
- 軽量展開の利点高度な技術を駆使して エムシーピー プロトコルとサーバーレスアーキテクチャにより、開発の難易度を劇的に下げ、迅速なデプロイを可能にし、開発プロセスを簡素化する。
- 標準化されたインターフェース設計グローバルな開発者が開発したロボティックスキルモジュールのワンクリック適応をサポートします。
- リアルタイム・センシングとモデリング機能動的環境におけるリアルタイムの知覚とモデリングのために、新しいマルチオントロジー時空間記憶シーングラフ共有メカニズムが追加され、複雑な環境への適応性が強化された。
- タスクモニタリングとクローズドループフィードバック: タスクの進捗状況をリアルタイムで追跡し、タスクが安定的かつ確実に完了することを保証する、マルチグラニュラリティ・タスク・モニタリング・モジュールを導入。
RoboOS 2.0公式サイトアドレス
- プロジェクトのウェブサイト:: https://github.com/FlagOpen/RoboOS
- GitHubリポジトリ:: https://github.com/FlagOpen/RoboOS
- arXivテクニカルペーパー:: https://arxiv.org/pdf/2505.03673
ロボOS 2.0の使い方
- 公式ウェブサイトを見るRoboOS2.0公式ウェブサイトまたはGitHubリポジトリをご覧ください。
- 環境準備::
- ハードウェア要件サポートされているロボット・ハードウェア・デバイスが利用可能であることを確認し、インターフェイスと互換性を理解すること。
- ソフトウェア環境Python、ROS(該当する場合)など、必要な依存ライブラリや開発ツールをインストールします。
- インストールと設定::
- クローン倉庫RoboOS 2.0 GitHub リポジトリをローカルにクローンします:
git clone https://github.com/FlagOpen/RoboOS.git
cd RoboOS- 依存関係のインストールプロジェクトのドキュメントに従って、必要な依存関係をインストールする:
pip install -r requirements.txt- 設定ファイルハードウェアやアプリケーションのシナリオに応じて、コンフィギュレーション・ファイル(たとえば
config.yaml)、ロボットパラメータ、ネットワークアドレスなどを設定する。
- ブレインモジュールの展開::
- クラウド展開Cloud Brainモジュールを使用する必要がある場合は、サポートされているクラウドプラットフォーム(AWS、Azure、AliCloudなど)にデプロイしてください。ドキュメントの指示に従ってセットアップしてください。
- ローカルテスト: 開発とテストのために、ブレイン・モジュールをローカル・マシンで実行します。
- 小脳モジュールの配置::
- ハードウェア適応ロボットのハードウェアに基づいて、小脳モジュールをロボットに配置する。小脳モジュールが脳モジュールと通信できることを確認する。
- 技能登録RoboOS2.0のスキルストア機能を使って、ロボットのスキルモジュールを登録・管理します。
- 運転と試運転
- アクティベーションシステム大脳モジュールと小脳モジュールを作動させるには、説明書の指示に従ってください。
# 启动大脑模块
python brain_module.py
# 启动小脑模块
python cerebellum_module.py- リアルタイム・モニタリングタスクモニタリングモジュールを使用して、タスクの実行状況をリアルタイムで確認し、システムが正常に動作していることを確認します。
- デバッグの最適化運転状況に応じてパラメータを調整し、性能を最適化します。
RoboOS2.0コアの利点
- 効率的な相乗効果このシステムは、大脳と小脳のアーキテクチャによって、高度な認知と専門的な技能の実行の効率的な役割分担を実現し、複数ロボットの協働をサポートし、タスクを動的に割り当てて並列実行し、タスクの実行効率を大幅に高めるように設計されている。
- 軽量で展開が容易MCPプロトコルとサーバーレスアーキテクチャを統合することで、開発の敷居を下げ、デプロイメントプロセスを簡素化し、ロボットシステムを迅速にオンライン化し、開発時間とコストを削減します。
- 力強い環境意識リアルタイム共有メモリ機構とマルチオントロジー時空間メモリシーングラフ共有機構を備え、環境状態を動的に更新し、動的環境におけるリアルタイム知覚とモデリングをサポートし、ロボットの複雑な環境への適応能力を向上させる。
- 標準化と互換性標準化されたインターフェースを提供することで、異なるハードウェアやメーカー間での適応の違いをなくし、グローバルな開発者が作成したロボットスキルモジュールのワンクリック適応をサポートすることで、システムの適用シナリオと柔軟性を大幅に拡大します。
- システムレベルの最適化エンド・ツー・エンドの推論リンクのシステムレベルの最適化により、全体的なパフォーマンスが大幅に改善され、エンド・ツー・エンドのクラウド通信効率が劇的に向上。
- タスクの監視と信頼性クローズドループ・タスクフィードバックを実現し、タスク実行の安定性と成功率を向上させ、タスクの確実な完了を保証し、システムの信頼性と実用性を高める。
RoboOS 2.0は誰のためのものですか?
- ロボット開発者標準化されたインターフェースと軽量なデプロイメントを提供することで、開発の敷居を下げ、個人開発者でもチーム開発者でも、複雑なロボットアプリケーションの開発に素早く着手し、効率的に開発できるようにします。
- (研究者ロボット工学、人工知能、多知能身体システムの研究に携わる研究者に理想的な実験プラットフォームを提供し、大学の研究室における学術研究・教育・実験を支援する。
- ビジネスおよび産業用ユーザーマルチロボット・コラボレーションと強力なタスク処理機能により、生産性と自動化レベルを大幅に向上させることができる物流、倉庫、製造、ヘルスケアなどの業界の企業にとって理想的な選択肢となる。
- 家計とサービス家庭用サービスロボットがダイナミックな家庭環境に適応し、家事などのタスクをこなせるようにする。
- 教育機関初等・中等教育のツールとして、生徒のロボット工学や人工知能への興味を喚起し、職業訓練のための実践的なプラットフォームを提供することで、生徒や実務者の関連技能の習得を支援する。
© 著作権表示
記事の著作権 AIシェアリングサークル 無断転載はご遠慮ください。
関連記事




コメントはありません