
Alpamayo-R1 - NVIDIAのオープンソース推論機能付き視覚言語アクションモデル

アルパマヨ-R1とは?
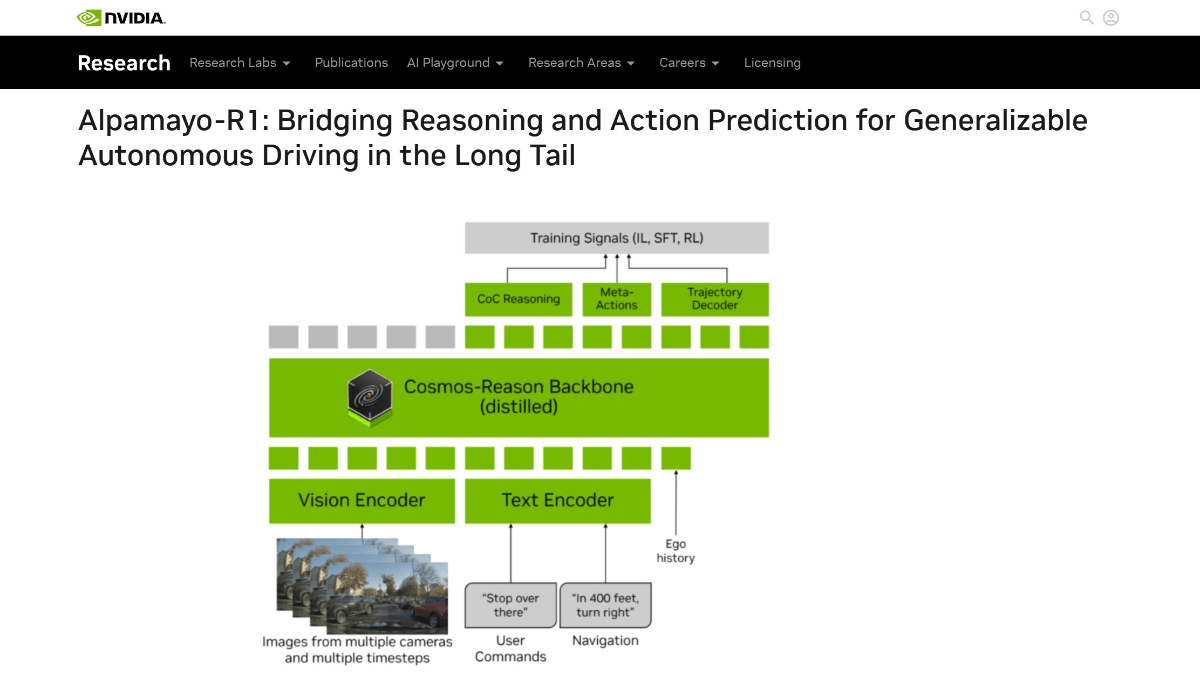
Alpamayo-R1は、NVIDIAが開発した推論機能付きVLA(Vision-Language-Action)モデルで、複雑なシナリオにおける自律走行の意思決定能力を強化するために設計されています。因果連鎖の推論メカニズムを導入することで、車両は単に事前に設定されたコマンドを実行するのではなく、人間のドライバーのようにシーンの因果関係(例えば「前方に歩行者がいるため減速する」など)を分析することができます。このモデルは、マルチカメラ入力と軽量コーディング技術を使用して計算コストを削減し、強化学習によって軌道計画を最適化します。革新的な技術には、構造化された因果関係注釈データセットと、100ミリ秒未満のリアルタイム推論待ち時間をサポートするモジュール設計が含まれます。
アルパマヨ-R1の機能的特徴
- 因果推論と軌道計画因果連鎖(CoC)データセットを構築することで、AR1は因果推論を実行し、ドライビング・ロジックと整合性のある推論の軌跡を生成し、意思決定の精度と一般性を向上させることができる。
- 効率的な視覚コーディングと特徴抽出視覚コーダーの最適化により、マルチカメラ画像の特徴抽出効率を10~20倍向上させ、計算リソースの消費を大幅に削減する。
- リアルタイムで低遅延モデルのエンド・ツー・エンドの推論時間はわずか99ミリ秒であり、自律走行における厳しいリアルタイム要件を満たしている。
- 軌道の質の向上AR1は、オープン・ループとクローズド・ループの両方の評価で、オフロードとニア・コンタクト・レートを大幅に低減し、軌道の滑らかさと安全性を向上させた。
アルパマヨ-R1の主な利点
- 因果推論コーザル・チェーン(CoC)データセットにより、AR1は因果推論を実行し、ドライビング・ロジックと一致する軌道を生成することができる。
- 効率的なビジュアル・コーディング視覚コーダーを最適化することで、高い精度を維持しながら、特徴トークンの数を大幅に減らし、計算リソースの消費を抑える。
- 低遅延とリアルタイムエンド・ツー・エンドの推論時間はわずか99ミリ秒であり、自律走行の厳しいリアルタイム要件を満たしている。
- 軌道の品質向上オープン・ループとクローズド・ループの両方のレビューで、オフロードとプロキシミティ・レートを大幅に低減し、よりスムーズで安全な軌道を生成します。
- オープンソースで敷居が低いオープンソースモデルとして、自律走行研究開発の敷居を下げ、業界に強力な技術サポートを提供する。
- マルチモーダルフュージョン視覚情報、言語情報、運動情報を組み合わせることで、AR1は複雑な交通シナリオをよりよく理解し、より正確なプランニング・ソリューションを生成することができる。
アルパマヨ-R1の公式ウェブサイトは?
- プロジェクトのウェブサイト:: https://research.nvidia.com/publication/2025-10_alpamayo-r1
- arXivテクニカルペーパー:: https://arxiv.org/pdf/2511.00088v1
アルパマヨ-R1が適応となる人
- 自動車メーカーAR1は、自動車メーカーに強力な自動運転技術ソリューションを提供することで、自動車の自動運転機能を強化し、自動運転技術の商業化を加速することができます。
- 自律走行研究開発チーム大手自動車会社のスマート・ドライビング・チームであれ、スタートアップの自動運転技術会社であれ、AR1のオープンソースの性質は研究開発の障壁を低くし、自動運転技術の開発とテストをより効率的に行うことを可能にする。
- インテリジェント・トランスポート・ソリューション・プロバイダー企業はAR1を利用して、輸送システムのインテリジェンスを強化し、交通の流れを最適化し、全体的な交通効率を向上させることができます。
- 研究機関および大学AR1はオープンソースであるため、研究者や大学の研究チームが自律走行に関する学術研究や技術探索を行うのに理想的なツールです。
- トラフィックレギュレータAR1の技術サポートにより、規制当局は自律走行システムの安全性をより適切に評価し、より科学的な政策や基準を策定することができます。
© 著作権表示
記事の著作権 AIシェアリングサークル 無断転載はご遠慮ください。
関連記事


コメントはありません