UnifoLM-WMA-0 - Arquitectura de acción del modelo mundial de código abierto de Ushu Technology
Últimos recursos sobre IAPublicado hace 6 meses Círculo de intercambio de inteligencia artificial 44.7K 00

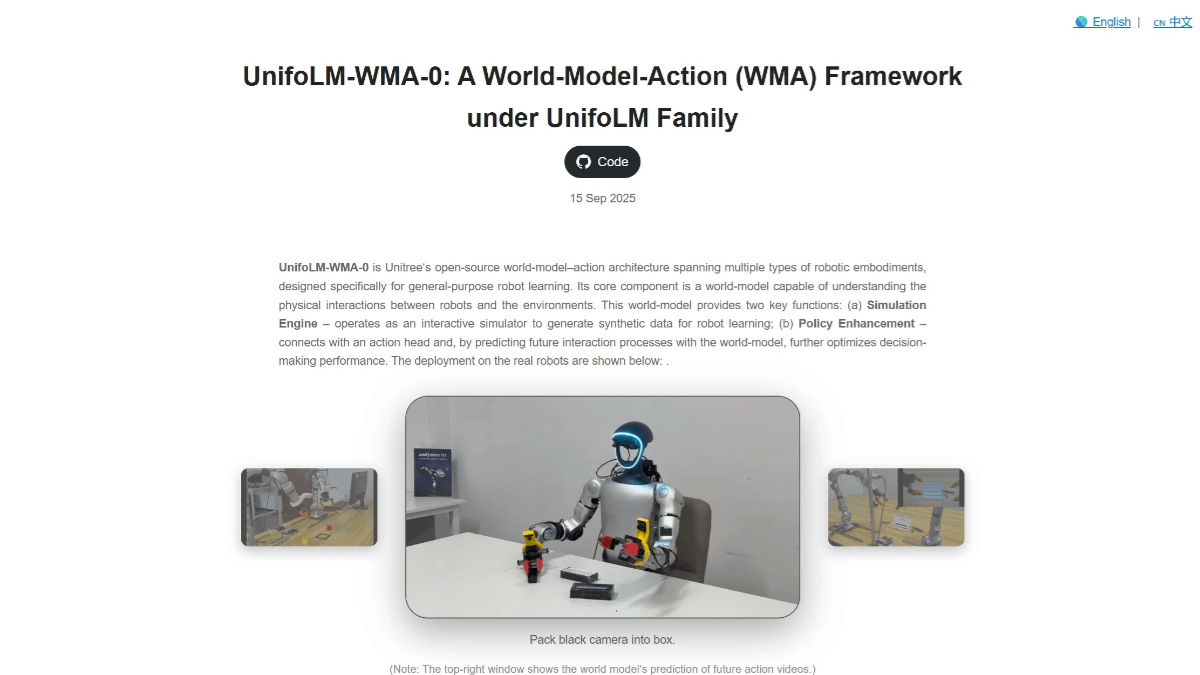
¿Qué es UnifoLM-WMA-0?
UnifoLM-WMA-0 es una arquitectura de acción-modelo del mundo de código abierto que abarca múltiples clases de ontologías robóticas, diseñada para el aprendizaje general de robots. Compuesta por un modelo del mundo y una arquitectura de acción, el modelo del mundo comprende las leyes físicas de la interacción robot-entorno, mientras que la arquitectura de acción es responsable de la ejecución de acciones específicas. En primer lugar, funciona como un motor de simulación que proporciona datos sintéticos para el aprendizaje del robot, como un campo de entrenamiento virtual, que puede generar una gran cantidad de datos sintéticos para el aprendizaje y el entrenamiento del robot; en segundo lugar, interactúa con la cabeza de acción para optimizar aún más el rendimiento de la toma de decisiones mediante la predicción del futuro proceso de interacción con el mundo físico. Los robots que utilizan esta arquitectura son capaces de realizar una serie de tareas complejas, como apilar bloques de madera en secuencia y organizar objetos.
Características de UnifoLM-WMA-0
- Versatilidad multiplataforma: Admite una amplia gama de ontologías robóticas, incluidos robots cuadrúpedos, brazos robóticos, etc., lo que permite la migración de aprendizaje y el trabajo colaborativo entre distintos robots.
- Modelo mundial de conductor: Comprender las leyes físicas de la interacción robot-entorno mediante la construcción de un modelo del mundo que proporcione a los robots un conocimiento profundo de su entorno, capaz de predecir escenarios complejos y adaptarse a ellos.
- Características del motor de simulaciónFunciona como un simulador interactivo, proporcionando datos sintéticos para el aprendizaje de robots, acelerando el proceso de aprendizaje y reduciendo el coste del ensayo y error en entornos reales.
- Optimización de la arquitectura de accióninterfaz con las cabezas de acción para optimizar aún más el rendimiento de la toma de decisiones y mejorar la precisión y la eficacia de las acciones mediante la predicción de futuros procesos de interacción con el mundo físico.
- Código abierto y actualización continua: Código fuente abierto completo, proporcionar documentación detallada y ejemplos, fácil para los desarrolladores a utilizar y ampliar. Yushu Technology se compromete a la actualización continua para asegurar que la arquitectura de la avanzada y práctica.
- Tareas complejas: Robots de apoyo para realizar una serie de tareas complejas, como apilar objetos en secuencia y ordenar escritorios, demostrando una gran adaptabilidad y flexibilidad a las tareas.
Principales ventajas de UnifoLM-WMA-0
- Versatilidad multiplataformaLa base de datos de ontologías robóticas: puede admitir muchos tipos de ontologías robóticas, incluidos robots cuadrúpedos, brazos robóticos, etc., y realizar la migración de aprendizaje y el trabajo colaborativo entre distintos robots, con una gran versatilidad y extensibilidad.
- Generación eficiente de datosEl simulador interactivo puede generar rápidamente una gran cantidad de datos sintéticos, lo que proporciona un rico material de entrenamiento para el aprendizaje de los robots, acelera el proceso de aprendizaje y reduce el coste del ensayo y error en entornos reales.
- Optimización del rendimiento en la toma de decisionesObjetivos: Optimizar aún más el rendimiento de la toma de decisiones de la cabeza de acción mediante la predicción del futuro proceso de interacción con el mundo físico a través del modelo del mundo, y mejorar la adaptabilidad del robot y la precisión de sus acciones en entornos complejos.
- Adaptabilidad a tareas complejasEl robot puede realizar una serie de tareas complejas, como apilar objetos en orden, ordenar el escritorio, etc., demostrando una gran adaptabilidad y flexibilidad a las tareas, y es capaz de satisfacer las necesidades de diversos escenarios de aplicación.
¿Cuál es el sitio web oficial de UnifoLM-WMA-0?
- Página web del proyecto:: https://unigen-x.github.io/unifolm-world-model-action.github.io/
- Repositorio GitHub:: https://github.com/unitreerobotics/unifolm-world-model-action
Personas a las que va dirigido UnifoLM-WMA-0
- investigador (científico)Capacidad para llevar a cabo investigaciones relacionadas con el aprendizaje robótico, la inteligencia artificial y el aprendizaje automático basado en arquitecturas de código abierto, explorando nuevos algoritmos y modelos.
- profesores y estudiantes de enseñanza superior: Proporcionar una plataforma práctica a estudiantes y profesores de ingeniería robótica e inteligencia artificial para proyectos de enseñanza e investigación.
- Desarrolladores de robots: Ayudar a los desarrolladores a construir y optimizar rápidamente sistemas robóticos de acción y toma de decisiones para acelerar los ciclos de desarrollo de productos.
- Ingeniero de aplicaciones industrialesPara ingenieros que trabajan en los campos de la logística, la automatización industrial, la robótica de servicios, etc., con el fin de optimizar la aplicación de robots en escenarios reales.
- entusiasta de la tecnologíaLos entusiastas interesados en la robótica y la tecnología de IA pueden aprender y experimentar con la arquitectura y explorar las posibilidades de la robótica.
© declaración de copyright
Derechos de autor del artículo Círculo de intercambio de inteligencia artificial Todos, por favor no reproducir sin permiso.
Puestos relacionados




Sin comentarios...