RoboBrain-X0 - Wisdom Source Research Institute modelo de encarnación generalizado de ontología cruzada de muestra cero de código abierto
Últimos recursos sobre IAPublicado hace 6 meses Círculo de intercambio de inteligencia artificial 34.3K 00

¿Qué es RoboBrain-X0?
RoboBrain-X0 es el primer modelo encarnado de código abierto del mundo que admite la generalización de ontologías cruzadas con muestra cero, lo que es de gran importancia para la industria. RoboBrain-X0 puede controlar varios robots reales de distintas configuraciones para que realicen tareas básicas sin necesidad de ajuste fino, y muestra una adaptabilidad entre ontologías a tareas complejas tras un pequeño ajuste fino por muestreo. Al unificar el modelado de la visión, el lenguaje y la acción, consigue la generalización y adaptación entre ontologías, y tiene la capacidad integrada desde la percepción hasta la ejecución, proporcionando una base universal reutilizable y escalable para la industria de la inteligencia incorporada. Mientras tanto, se espera que el conjunto de datos de entrenamiento de código abierto acelere la aplicación de la inteligencia incorporada en los campos de la robótica de servicios, la fabricación inteligente, etc.
Características funcionales de RoboBrain-X0
- Generalización ontológica cruzada de muestra ceroLa capacidad de accionar directamente una amplia gama de robots reales de distintas configuraciones para realizar tareas operativas básicas sin necesidad de ajustar individualmente cada robot.
- Potencial de ajuste de muestras pequeñasEl resultado es que, tras un ajuste fino en un pequeño número de muestras (por ejemplo, 50 entradas), la aptitud de la ontología cruzada del modelo para tareas complejas puede mejorarse significativamente para optimizar aún más la ejecución de la tarea.
- Controlar la coherenciaEl resultado: las secuencias de acción generadas de distintos robots que realizan la misma tarea son muy coherentes, lo que garantiza la fiabilidad y estabilidad de la operación real.
- Modelización unificadaLa modelización unificada de la visión, el lenguaje y el movimiento permite integrar las capacidades desde la percepción hasta la ejecución, proporcionando un soporte de inteligencia más completo para los robots.
- Desmontaje eficiente de tareasLa capacidad de descomponer tareas complejas en secuencias de acciones semánticas genéricas y traducirlas en tiempo real en instrucciones ejecutables para robots específicos mejora la flexibilidad y adaptabilidad de la ejecución de tareas.
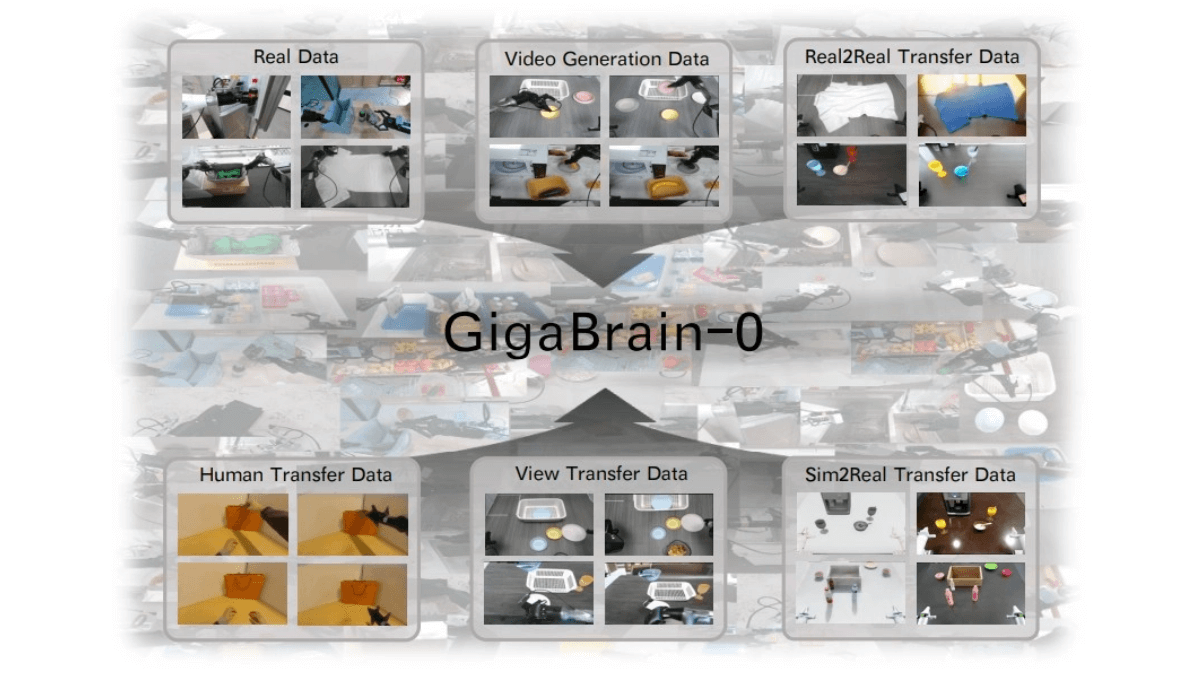
- Soporte de conjuntos de datos abiertosOpen-sourced its core training dataset, which provides developers with rich data resources and helps accelerate development and application of embodied intelligence technologies.
- Entradas y salidas multimodalesAdmite múltiples modos de entrada (por ejemplo, una sola imagen, varias imágenes, texto) y salidas de acción multidimensionales, adaptándose a diversos escenarios de tareas y necesidades operativas.
Principales ventajas de RoboBrain-X0
- Gran capacidad de generalización entre ontologíasPermite la migración de muestra cero entre muchos robots diferentes sin necesidad de volver a entrenar el modelo para cada robot, lo que mejora enormemente la generalidad y adaptabilidad del modelo.
- Ejecución eficaz del mandatoEl sistema de gestión de tareas de la Comisión Europea: descomponiendo tareas complejas en secuencias de acciones semánticas genéricas y traduciéndolas después en tiempo real en instrucciones ejecutables para robots específicos, garantiza una ejecución eficaz y precisa de las tareas.
- Conjunto de datos de código abiertoEl objetivo de este proyecto es: proporcionar un rico conjunto de datos de entrenamiento de código abierto que constituya un valioso recurso para los desarrolladores y contribuya a acelerar el desarrollo y la aplicación de las tecnologías de inteligencia incorporada.
- fusión multimodalLa unificación de la modelización de la visión, el lenguaje y la acción confiere a los modelos la capacidad de integrarse desde la percepción hasta la ejecución, lo que permite una mejor comprensión y adaptación a tareas complejas en el mundo real.
- Las muestras pequeñas tienen un gran potencial de ajusteEl modelo, con un pequeño número de muestras ajustadas, es capaz de mejorar aún más su adaptación entre ontologías a tareas complejas, demostrando una mayor capacidad de generalización y reduciendo los costes de recogida de datos y formación.
- Gran coherencia de controlLa ontología: Diferentes ontologías generan secuencias altamente consistentes de primitivas de acción cuando se realiza la misma tarea, asegurando la fiabilidad y estabilidad de la ejecución física real.
- Arquitectura técnica avanzadaEl objetivo de este proyecto es desarrollar un lenguaje de acciones primitivas que mejore la coherencia semántica y la transferibilidad del modelo mediante el uso de técnicas avanzadas como el cuantificador residual agrupado (GRVQ) para mapear secuencias de control continuas con diferentes grados de libertad y estructuras mecánicas en un espacio de lenguaje de acciones primitivas discretas compartido.
¿Cuál es la página web oficial de RoboBrain-X0?
- Página web del proyecto:: https://superrobobrain.github.io/
- Repositorio Github:: https://github.com/FlagOpen/RoboBrain-X0
- Biblioteca de modelos HuggingFace:: https://huggingface.co/BAAI/RoboBrain-X0-Preview
- Conjunto de datos RoboBrain-X0:: https://huggingface.co/datasets/BAAI/RoboBrain-X0-Dataset
¿A quién va dirigido RoboBrain-X0?
- Ingeniero de I+D en robóticaDesarrollar e implantar rápidamente múltiples aplicaciones robóticas utilizando el modelo, reduciendo la duplicación de esfuerzos de desarrollo para diferentes hardware robótico.
- Investigadores en inteligencia artificial: Puede basarse en este modelo para llevar a cabo investigaciones en campos tan punteros como la inteligencia incorporada y el aprendizaje multimodal, y promover el desarrollo de la tecnología.
- Universidades e instituciones de investigación: sirven como herramientas de enseñanza e investigación para ayudar a estudiantes e investigadores a comprender y practicar mejor la integración de la robótica y la inteligencia artificial.
- Empresa de fabricación inteligenteEl sistema de automatización de robots de la Comisión Europea: puede utilizarse para optimizar los procesos de producción, aumentar los niveles de automatización y permitir la aplicación flexible de robots en escenarios industriales complejos.
- Empresas de robótica de serviciosAcelerar el desarrollo y la iteración de productos de robots de servicio y mejorar la adaptabilidad y la experiencia de usuario de los robots en diferentes escenarios de servicio.
- Profesionales del sector de la logística y el almacenamientoEl objetivo de este modelo es mejorar la eficacia y precisión de los robots logísticos en tareas como la clasificación y manipulación de cargas.
© declaración de copyright
Derechos de autor del artículo Círculo de intercambio de inteligencia artificial Todos, por favor no reproducir sin permiso.
Artículos relacionados

Sin comentarios...