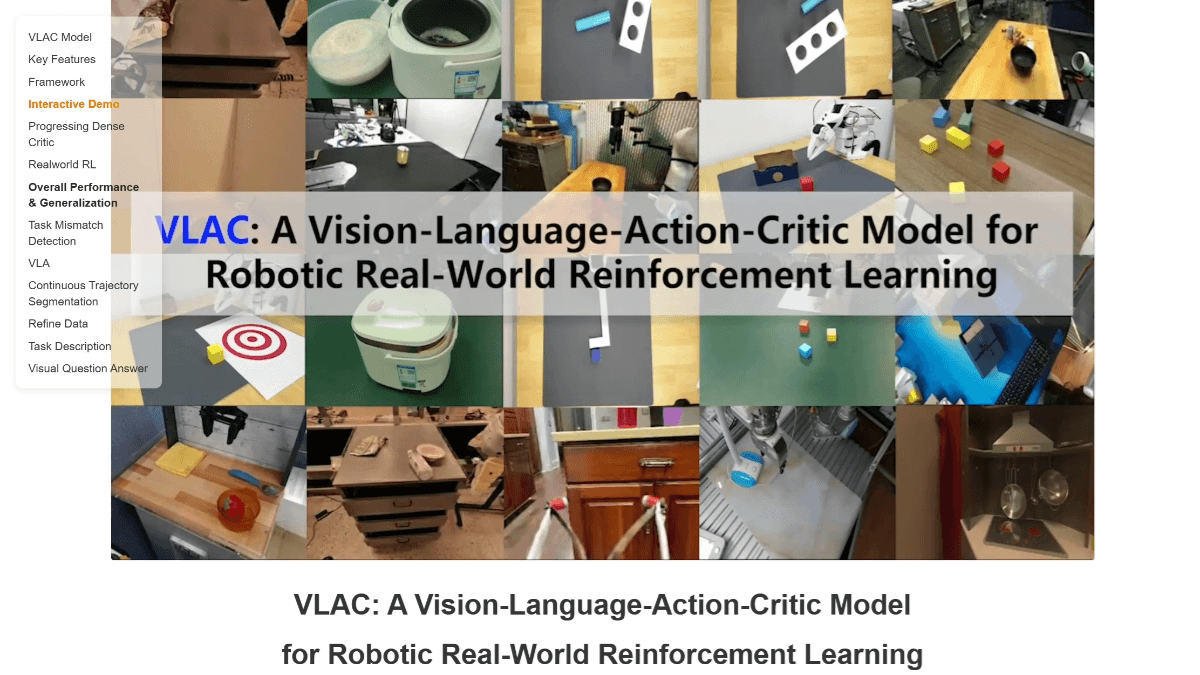
VLAC - Grande modelo de código aberto de recompensas incorporadas do Shanghai AI Lab

O que é VLAC?
O VLAC é um macromodelo de recompensa incorporado de código aberto do Shanghai Artificial Intelligence Laboratory. Com base no macromodelo multimodal InternVL, ele integra dados de vídeo da Internet e dados de operação do robô para fornecer recompensa de processo e estimativa de conclusão de tarefas para o aprendizado de reforço do robô no mundo real. O VLAC pode distinguir com eficácia entre o avanço normal e os comportamentos anormais/estagnados, além de oferecer suporte à rápida generalização de pequenas amostras por meio do aprendizado no contexto. O VLAC oferece suporte à suavização local e ao mecanismo de recompensa negativa para garantir a estabilidade e a eficácia do aprendizado por reforço. O VLAC pode emitir sinais de recompensa e comandos de ação do robô, o que ajuda o robô a aprender de forma autônoma e a se adaptar a novos cenários no mundo real.
Características funcionais do VLAC
- Fusão de dados multimodaisCombinação de dados de vídeo da Internet e dados de manipulação de robôs para melhorar a compreensão integrada de tarefas e ambientes.
- Incentivos ao processo e estimativas de conclusãoRecomendação: Forneça recompensas de processo e estimativas de conclusão de tarefas para fornecer sinais supervisionados estáveis e confiáveis para o aprendizado por reforço.
- Reconhecimento de comportamentos anormaisDiferenciação: Pode diferenciar com eficácia o avanço normal e os comportamentos anormais/estagnados, evitando a exploração ineficaz e melhorando a eficiência do aprendizado.
- Generalização rápida para amostras pequenasAprendizagem em contexto: suporta a aprendizagem em contexto para se adaptar rapidamente a novas tarefas com um pequeno número de amostras e melhorar a capacidade de generalização do modelo.
- Saída do comando de açãoGeração de comandos de ação do robô e fornecimento de sinais de recompensa para controle de loop fechado da percepção à ação.
- Reforço do suporte da estrutura de aprendizadoEstrutura de aprendizado por reforço de VLA criada em torno do VLAC para dar suporte ao aprendizado colaborativo e à rápida adaptação de vários robôs no mundo real.
- Otimização da colaboração entre homem e computadorA flexibilidade do treinamento e a eficiência do aprendizado são aprimoradas ainda mais por meio de vários modos de colaboração entre humanos e computadores, como a reprodução de dados por especialistas e a exploração assistida manualmente.
Principais pontos fortes da VLAC
- Geração eficiente de sinais de recompensaEle pode fornecer sinais de recompensa contínuos, densos e confiáveis para apoiar efetivamente o processo de aprendizagem por reforço e acelerar a eficiência da aprendizagem dos robôs.
- Identificação eficaz de comportamentos anormaisCaracterísticas: Pode distinguir com precisão entre a operação normal e o comportamento anormal/estagnado, evitando a exploração ineficaz e melhorando a eficiência do aprendizado e o sucesso da tarefa.
- Excelente capacidade de generalizaçãoGeneralização rápida de pequenas amostras por meio de aprendizado no contexto, adaptação rápida a novas tarefas e cenários e requisitos de dados reduzidos.
- Integração de comandos de ação e recompensasDescrição: Fornecer sinais de recompensa que possam emitir comandos de ação do robô, realizar o controle de loop fechado da percepção à ação e aumentar a eficiência da execução da tarefa.
- Integração da estrutura de aprendizado por reforçoO quadro de aprendizagem por reforço do VLA, criado com base no VLAC, oferece suporte à aprendizagem colaborativa de vários robôs e melhora a adaptação do robô no mundo real.
- Otimização da colaboração entre homem e computadorSuporte a vários modos de colaboração entre humanos e computadores, como reprodução de dados por especialistas e exploração assistida manualmente, aumentando ainda mais a flexibilidade e a eficiência do treinamento.
- Uma abordagem de treinamento orientada por dadosFusão de dados de vídeo da Internet e dados de operação do robô para aumentar a estabilidade e a confiabilidade do modelo usando dados em grande escala.
- Código aberto e suporte da comunidadeComo um projeto de código-fonte aberto, ele oferece documentação rica e suporte da comunidade para facilitar que desenvolvedores e pesquisadores comecem a trabalhar rapidamente e participem das contribuições.
Qual é o site oficial da VLAC?
- Site do projeto:: https://vlac.intern-ai.org.cn
- Repositório do Github:: https://github.com/InternRobotics/VLAC
- Biblioteca do modelo HuggingFace:: https://huggingface.co/InternRobotics/VLAC
Para quem é a VLAC
- Engenheiro de P&D em robóticaUso do VLAC para melhorar a eficiência do aprendizado de robôs e as taxas de conclusão de tarefas e acelerar o desenvolvimento de robôs para aplicações no mundo real.
- Pesquisadores de inteligência artificialPesquisa sobre tecnologias de ponta, como aprendizado por reforço e fusão multimodal, otimização de algoritmos e aprimoramento de modelos com a ajuda do VLAC.
- Universidades e instituições de pesquisaOs artigos de pesquisa: servem como ferramentas de ensino e pesquisa para ajudar estudantes e pesquisadores a obter uma compreensão mais profunda dos recentes avanços em inteligência incorporada e aprendizado por reforço.
- empresa de tecnologiaEmpresas que desenvolvem produtos robóticos inteligentes para aprimorar o nível de inteligência e a competitividade de mercado de seus produtos por meio da VLAC.
- Operadores e mantenedores de robóticaUso do VLAC na prática para otimizar a execução de tarefas de robôs e melhorar a eficiência e a qualidade.
© declaração de direitos autorais
Direitos autorais do artigo Círculo de compartilhamento de IA A todos, favor não reproduzir sem permissão.
Artigos relacionados

Nenhum comentário...