UnifoLM-WMA-0 - Arquitetura de ação de modelo mundial de código aberto da Yushu Technology

O que é o UnifoLM-WMA-0?
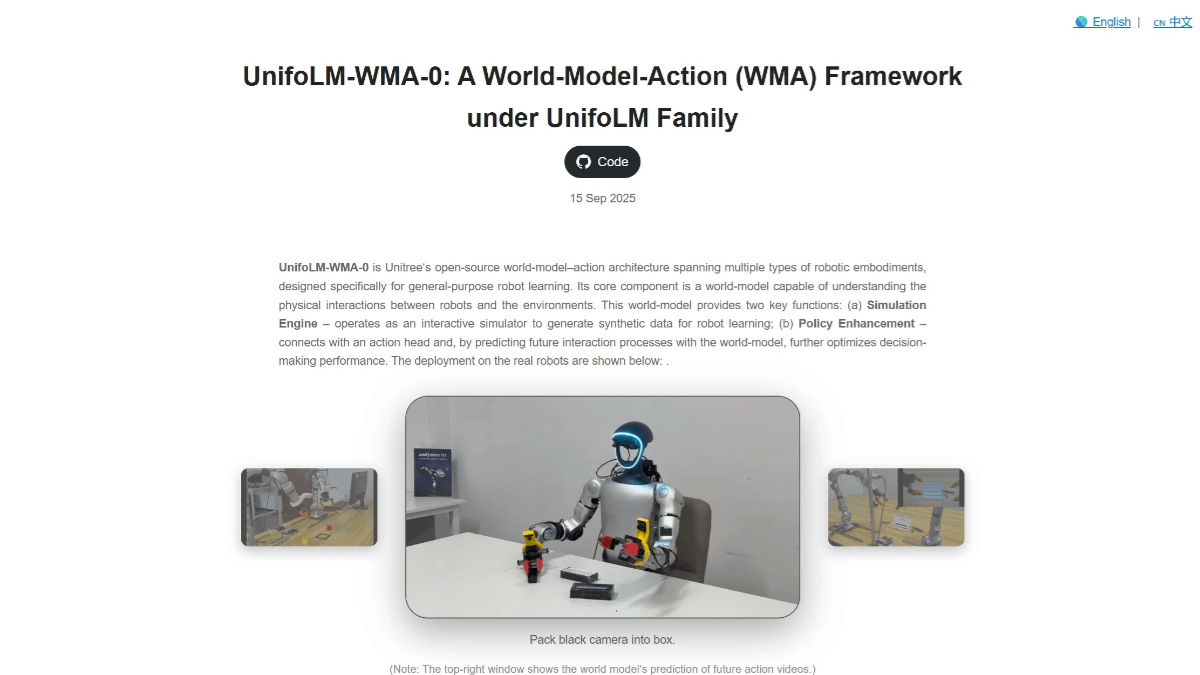
O UnifoLM-WMA-0 é uma arquitetura de modelo de mundo-ação de código aberto em várias classes de ontologias de robôs, projetada para o aprendizado geral de robôs. Composto por um modelo de mundo e uma arquitetura de ação, o modelo de mundo compreende as leis físicas da interação robô-ambiente, enquanto a arquitetura de ação é responsável pela execução de ações específicas. Em primeiro lugar, ela é executada como um mecanismo de simulação para fornecer dados sintéticos para o aprendizado do robô, como um campo de treinamento virtual, que pode gerar uma grande quantidade de dados sintéticos para o aprendizado e o treinamento do robô; em segundo lugar, ela faz interface com o cabeçote de ação para otimizar ainda mais o desempenho da tomada de decisões, prevendo o futuro processo de interação com o mundo físico. Os robôs que usam essa arquitetura são capazes de executar uma série de tarefas complexas, como empilhar blocos de madeira em sequência e organizar objetos.
Recursos do UnifoLM-WMA-0
- Versatilidade entre plataformasSuporte a uma ampla variedade de ontologias de robôs, incluindo robôs quadrúpedes, braços robóticos, etc., permitindo a migração de aprendizado e o trabalho colaborativo entre diferentes robôs.
- Motorista modelo mundialCompreensão das leis físicas da interação robô-ambiente por meio da construção de um modelo do mundo que forneça aos robôs um conhecimento profundo de seu ambiente, capaz de prever e se adaptar a cenários complexos.
- Recursos do mecanismo de simulaçãoSimulador interativo: é executado como um simulador interativo, fornecendo dados sintéticos para o aprendizado do robô, acelerando o processo de aprendizado e reduzindo o custo de tentativa e erro em ambientes reais.
- Otimização da arquitetura de açãoInterface com os chefes de ação para otimizar ainda mais o desempenho da tomada de decisões e melhorar a precisão e a eficiência das ações, prevendo futuros processos de interação com o mundo físico.
- Código aberto e atualização contínuaCódigo-fonte aberto completo, com documentação e exemplos detalhados, fácil de usar e ampliar para os desenvolvedores. A Yushu Technology está comprometida com a atualização contínua para garantir que a arquitetura seja avançada e prática.
- Tarefas complexasSuporte a robôs para executar uma série de tarefas complexas, como empilhar itens em sequência e arrumar desktops, demonstrando grande adaptabilidade e flexibilidade de tarefas.
Principais benefícios do UnifoLM-WMA-0
- Versatilidade entre plataformasEle pode suportar muitos tipos de ontologias de robôs, incluindo robôs quadrúpedes, braços robóticos, etc., e realizar a migração de aprendizado e o trabalho colaborativo entre diferentes robôs, com grande versatilidade e extensibilidade.
- Geração eficiente de dadosO sistema é um simulador interativo, que pode gerar rapidamente uma grande quantidade de dados sintéticos, fornecendo um rico material de treinamento para a aprendizagem de robôs, acelerando o processo de aprendizagem e reduzindo o custo de tentativa e erro em ambientes reais.
- Otimização do desempenho na tomada de decisõesPara otimizar ainda mais o desempenho da tomada de decisões do cabeçote de ação, prevendo o processo de interação futura com o mundo físico por meio do modelo do mundo e para melhorar a adaptabilidade e a precisão das ações do robô em ambientes complexos.
- Adaptabilidade a tarefas complexasSuporte para que o robô execute uma série de tarefas complexas, como empilhar itens em ordem e arrumar a área de trabalho, etc., demonstrando grande adaptabilidade e flexibilidade de tarefas e sendo capaz de atender às necessidades de cenários de aplicação diversificados.
Qual é o site oficial do UnifoLM-WMA-0?
- Site do projeto:: https://unigen-x.github.io/unifolm-world-model-action.github.io/
- Repositório do GitHub:: https://github.com/unitreerobotics/unifolm-world-model-action
Pessoas a quem o UnifoLM-WMA-0 se destina
- Pesquisador (científico)Capacidade de conduzir pesquisas relacionadas ao aprendizado de robótica, inteligência artificial e aprendizado de máquina com base em arquiteturas de código aberto, explorando novos algoritmos e modelos.
- professores e alunos do ensino superiorObjetivo: Fornecer uma plataforma prática para alunos e professores de engenharia robótica e inteligência artificial para projetos de ensino e pesquisa.
- Desenvolvedores de robôsAjude os desenvolvedores a criar e otimizar rapidamente sistemas robóticos de ação e tomada de decisões para acelerar os ciclos de desenvolvimento de produtos.
- Engenheiro de aplicativos do setorPara engenheiros que trabalham nas áreas de logística, automação industrial, robótica de serviços, etc., para otimizar a aplicação de robôs em cenários do mundo real.
- entusiasta de tecnologiaA arquitetura da arquitetura de robótica é uma das principais características da tecnologia de IA: entusiastas interessados em robótica e tecnologia de IA podem aprender e experimentar a arquitetura e explorar as possibilidades da robótica.
© declaração de direitos autorais
Direitos autorais do artigo Círculo de compartilhamento de IA A todos, favor não reproduzir sem permissão.
Artigos relacionados


Nenhum comentário...