UnifoLM-WMA-0 - Yushu Technology Open Source World Model Action Architecture

Qu'est-ce que l'UnifoLM-WMA-0 ?
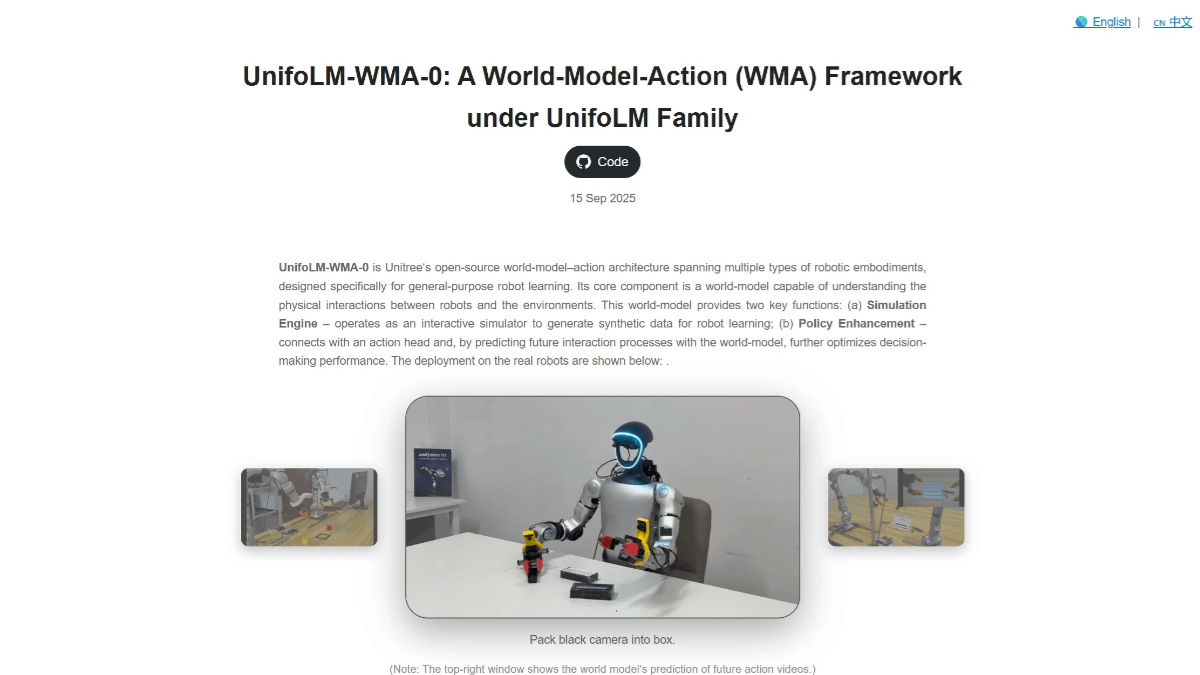
UnifoLM-WMA-0 est une architecture de modèle mondial et d'action à source ouverte couvrant plusieurs classes d'ontologies de robots, conçue pour l'apprentissage général des robots. Composé d'un modèle de monde et d'une architecture d'action, le modèle de monde comprend les lois physiques de l'interaction robot-environnement, tandis que l'architecture d'action est responsable de l'exécution d'actions spécifiques. Premièrement, elle fonctionne comme un moteur de simulation pour fournir des données synthétiques pour l'apprentissage du robot, comme un terrain d'entraînement virtuel, qui peut générer une grande quantité de données synthétiques pour l'apprentissage et l'entraînement du robot ; deuxièmement, elle s'interface avec la tête d'action pour optimiser davantage la performance de la prise de décision en prédisant le processus d'interaction futur avec le monde physique. Les robots utilisant cette architecture sont capables d'effectuer une série de tâches complexes, telles que l'empilement de blocs de bois en séquence et l'organisation d'objets.
Caractéristiques de l'UnifoLM-WMA-0
- Polyvalence multiplateformeLe système d'information sur les robots : il prend en charge un large éventail d'ontologies de robots, y compris les robots quadrupèdes, les bras robotiques, etc., ce qui permet la migration vers l'apprentissage et le travail collaboratif entre différents robots.
- Modèle mondial de conducteurComprendre les lois physiques de l'interaction robot-environnement en construisant un modèle du monde qui fournit aux robots une connaissance approfondie de leur environnement, capable de prédire et de s'adapter à des scénarios complexes.
- Caractéristiques du moteur de simulationL'objectif est de fournir des données synthétiques pour l'apprentissage des robots, d'accélérer le processus d'apprentissage et de réduire le coût des essais et des erreurs dans des environnements réels.
- Action Optimisation de l'architectureL'interface avec les têtes d'action permet d'optimiser la prise de décision et d'améliorer la précision et l'efficacité des actions en prévoyant les processus d'interaction futurs avec le monde physique.
- Source ouverte et mise à jour continueLe code source est entièrement ouvert et fournit une documentation détaillée et des exemples, ce qui permet aux développeurs de l'utiliser et de l'étendre facilement. Yushu Technology s'engage à une mise à jour continue afin de garantir que l'architecture du logiciel est avancée et pratique.
- Tâches complexesLes robots sont capables d'effectuer une série de tâches complexes, telles que l'empilage d'objets dans l'ordre et le rangement de bureaux, en faisant preuve d'une grande adaptabilité et d'une grande souplesse dans l'exécution des tâches.
Principaux avantages de l'UnifoLM-WMA-0
- Polyvalence multiplateformeIl peut prendre en charge de nombreux types d'ontologies robotiques, y compris les robots quadrupèdes, les bras robotiques, etc., et réaliser une migration d'apprentissage et un travail collaboratif entre différents robots, avec une grande polyvalence et une grande extensibilité.
- Génération efficace de donnéesIl fournit ainsi un matériel de formation riche pour l'apprentissage des robots, accélère le processus d'apprentissage et réduit le coût des essais et des erreurs dans les environnements réels.
- Optimisation des performances décisionnellesOptimiser davantage les performances décisionnelles de la tête d'action en prédisant le processus d'interaction futur avec le monde physique grâce au modèle du monde, et améliorer l'adaptabilité et la précision des actions du robot dans des environnements complexes.
- Adaptabilité aux tâches complexesLe robot est capable d'effectuer une série de tâches complexes, telles que l'empilage d'objets, le rangement du bureau, etc. Il fait preuve d'une grande adaptabilité et d'une grande flexibilité, et peut répondre aux besoins de divers scénarios d'application.
Quel est le site officiel de l'UnifoLM-WMA-0 ?
- Site web du projet: : https://unigen-x.github.io/unifolm-world-model-action.github.io/
- Dépôt GitHub: : https://github.com/unitreerobotics/unifolm-world-model-action
Personnes auxquelles l'UnifoLM-WMA-0 est destiné
- chercheur (scientifique)Capacité à mener des recherches liées à l'apprentissage robotique, à l'intelligence artificielle et à l'apprentissage automatique sur la base d'architectures open source, en explorant de nouveaux algorithmes et modèles.
- les enseignants et les étudiants de l'enseignement supérieurLe but est de fournir une plateforme pratique aux étudiants et aux professeurs de robotique et d'intelligence artificielle pour l'enseignement et les projets de recherche.
- Développeurs de robotsLes systèmes d'action et de décision robotiques : aider les développeurs à construire et à optimiser rapidement les systèmes d'action et de décision robotiques afin d'accélérer les cycles de développement des produits.
- Ingénieur d'application industriellePour les ingénieurs travaillant dans les domaines de la logistique, de l'automatisation industrielle, de la robotique de service, etc., afin d'optimiser l'application des robots dans des scénarios réels.
- passionné de technologieLes passionnés de robotique et de technologie de l'IA peuvent apprendre et expérimenter l'architecture et explorer les possibilités de la robotique.
© déclaration de droits d'auteur
Article copyright Cercle de partage de l'IA Tous, prière de ne pas reproduire sans autorisation.
Articles connexes


Pas de commentaires...