UnifoLM-WMA-0 - Yushu Technology Open Source Weltmodell-Aktionsarchitektur

Was ist UnifoLM-WMA-0?
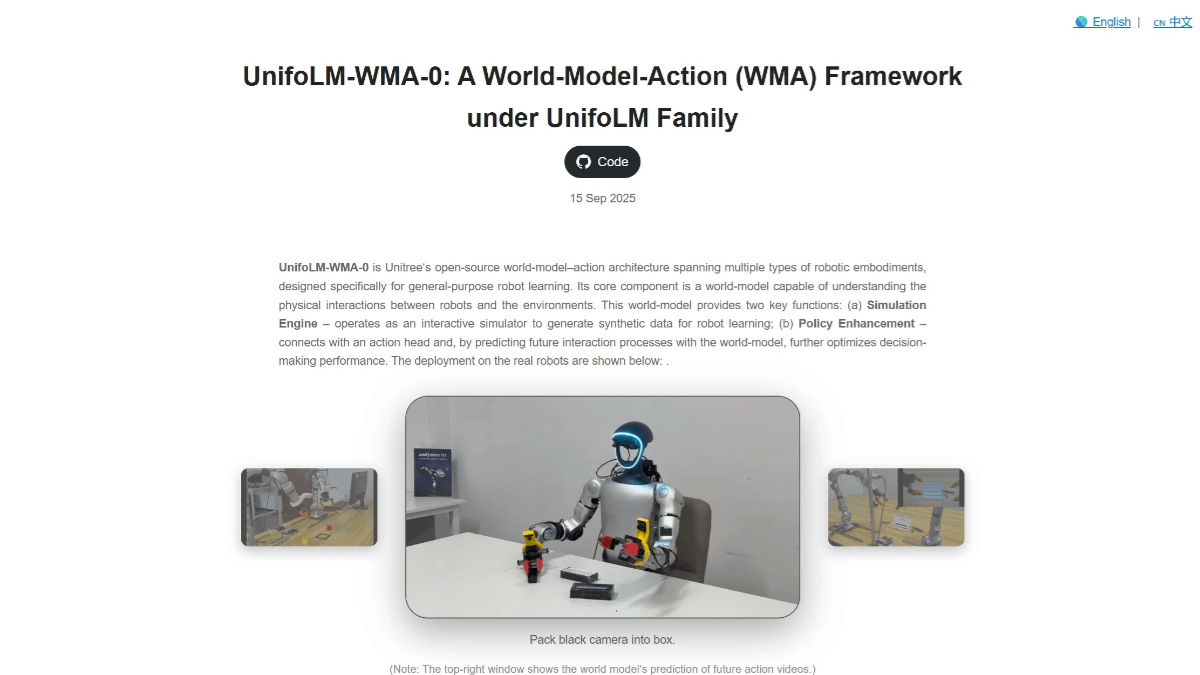
UnifoLM-WMA-0 ist eine quelloffene Weltmodell-Aktions-Architektur für mehrere Klassen von Roboter-Ontologien, die für allgemeines Roboterlernen entwickelt wurde. Bestehend aus einem Weltmodell und einer Aktionsarchitektur, versteht das Weltmodell die physikalischen Gesetze der Roboter-Umwelt-Interaktion, während die Aktionsarchitektur für die Ausführung spezifischer Aktionen verantwortlich ist. Die Aktionsarchitektur ist für die Ausführung spezifischer Aktionen zuständig. Erstens läuft sie als Simulationsmaschine, um synthetische Daten für das Lernen von Robotern bereitzustellen, wie ein virtuelles Trainingsgelände, das eine große Menge synthetischer Daten für das Lernen und Trainieren von Robotern generieren kann; zweitens bildet sie eine Schnittstelle mit dem Aktionskopf, um die Entscheidungsfindung durch Vorhersage des zukünftigen Interaktionsprozesses mit der physischen Welt weiter zu optimieren. Roboter, die diese Architektur nutzen, sind in der Lage, eine Reihe komplexer Aufgaben auszuführen, wie z. B. das Stapeln von Holzklötzen in einer bestimmten Reihenfolge und das Ordnen von Objekten.
Merkmale von UnifoLM-WMA-0
- Plattformübergreifende VielseitigkeitUnterstützt eine breite Palette von Roboter-Ontologien, einschließlich vierbeiniger Roboter, Roboterarme usw., die eine lernende Migration und kollaborative Arbeit zwischen verschiedenen Robotern ermöglichen.
- World Model DriverVerständnis der physikalischen Gesetzmäßigkeiten der Interaktion zwischen Roboter und Umgebung durch die Konstruktion eines Weltmodells, das den Robotern ein umfassendes Wissen über ihre Umgebung vermittelt und sie in die Lage versetzt, komplexe Szenarien vorherzusagen und sich an sie anzupassen.
- Eigenschaften des SimulationsprogrammsLäuft als interaktiver Simulator, der synthetische Daten für das Lernen von Robotern liefert, den Lernprozess beschleunigt und die Kosten für Versuch und Irrtum in realen Umgebungen reduziert.
- Aktion Architektur-OptimierungSchnittstelle zu Aktionsköpfen, um die Entscheidungsfindung weiter zu optimieren und die Genauigkeit und Effizienz von Handlungen durch Vorhersage künftiger Interaktionen mit der physischen Welt zu verbessern.
- Offener Quellcode und ständige AktualisierungenVollständiger offener Quellcode, detaillierte Dokumentation und Beispiele, einfach für Entwickler zu verwenden und zu erweitern. Yushu Technology verpflichtet sich zur kontinuierlichen Aktualisierung, um sicherzustellen, dass die Architektur der fortschrittlichen und praktischen.
- Komplexe AufgabenstellungUnterstützung von Robotern bei der Durchführung einer Reihe komplexer Aufgaben, wie z. B. das Stapeln von Gegenständen in einer bestimmten Reihenfolge und das Aufräumen von Schreibtischen, wobei eine hohe Anpassungsfähigkeit und Flexibilität bei den Aufgaben bewiesen wurde.
Die wichtigsten Vorteile des UnifoLM-WMA-0
- Plattformübergreifende VielseitigkeitEs kann viele Arten von Roboter-Ontologien unterstützen, einschließlich vierbeiniger Roboter, Roboterarme usw., und eine lernende Migration und kollaborative Arbeit zwischen verschiedenen Robotern realisieren, mit großer Vielseitigkeit und Erweiterbarkeit.
- Effiziente DatengenerierungAls interaktiver Simulator kann er schnell eine große Menge an synthetischen Daten erzeugen, die reichhaltiges Trainingsmaterial für das Lernen von Robotern liefern, den Lernprozess beschleunigen und die Kosten für Versuch und Irrtum in realen Umgebungen reduzieren.
- Optimierung der EntscheidungsfindungVorhersage zukünftiger Interaktionsprozesse mit der physischen Welt durch Weltmodellierung, weitere Optimierung der Entscheidungsleistung des Aktionskopfes und Verbesserung der Anpassungsfähigkeit und Genauigkeit der Aktionen des Roboters in komplexen Umgebungen.
- Anpassungsfähigkeit an komplexe AufgabenUnterstützung des Roboters bei der Ausführung einer Reihe komplexer Aufgaben, wie z. B. das geordnete Stapeln von Gegenständen, das Aufräumen des Schreibtisches usw., er weist eine hohe Anpassungsfähigkeit und Flexibilität auf und ist in der Lage, die Anforderungen der verschiedensten Anwendungsszenarien zu erfüllen.
Was ist die offizielle Website von UnifoLM-WMA-0?
- Projekt-Website:: https://unigen-x.github.io/unifolm-world-model-action.github.io/
- GitHub-Repository:: https://github.com/unitreerobotics/unifolm-world-model-action
Personen, für die UnifoLM-WMA-0 bestimmt ist
- (wissenschaftlicher) ForscherFähigkeit zur Durchführung von Forschungsarbeiten in den Bereichen Robotik, künstliche Intelligenz und maschinelles Lernen auf der Grundlage von Open-Source-Architekturen sowie zur Erforschung neuer Algorithmen und Modelle.
- Lehrende und Studierende der HochschulenStudenten und Lehrkräften der Robotik und der künstlichen Intelligenz soll eine praktische Plattform für Lehr- und Forschungsprojekte geboten werden.
- Roboter-EntwicklerUnterstützung von Entwicklern bei der raschen Entwicklung und Optimierung von Robotersystemen für Aktionen und Entscheidungsfindung, um die Produktentwicklungszyklen zu beschleunigen.
- Industrie-AnwendungstechnikerFür Ingenieure, die in den Bereichen Logistik, Industrieautomation, Servicerobotik usw. arbeiten, um den Einsatz von Robotern in realen Szenarien zu optimieren.
- TechnikbegeisterterEnthusiasten, die sich für Robotik und künstliche Intelligenz interessieren, können die Architektur erlernen und mit ihr experimentieren und die Möglichkeiten der Robotik erkunden.
© urheberrechtliche Erklärung
Artikel Copyright AI-Austauschkreis Alle, bitte nicht ohne Erlaubnis vervielfältigen.
Ähnliche Artikel


Keine Kommentare...